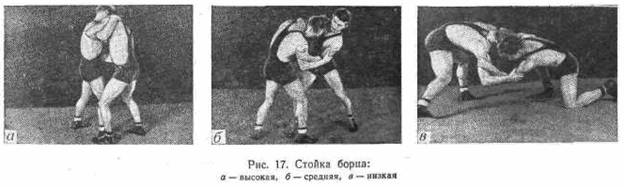
Ловкое движение борца: Техника и тактика вольной борьбы
Словарь цирковых терминов
АКРОБАТИКА (от греч. асrobateo — хожу на цыпочках, лезу вверх). Главенствующий жанр (см.) цирка, состоящий из многочисленных его разновидностей (прыжковой, силовой, пластической, конной, вольтижной), — в основе которого специальные упражнения, различные по характеру и степени сложности, демонстрирующие физическое совершенство человека.
АЛЛЮР — (франц. allure — походка). Различные виды хода лошади: шаг, галоп, иноходь, карьер, рысь.
АНТИПОД — (греч. anti — против и рus — род.падеж, podos — нога). Вид жонглирования, исполняемый артистом в лежачем положении на специальном устройстве — тринке с поднятыми вверх ногами, которыми он подбрасывает и ловит различные предметы, балансирует их, крутит шаговыми движениями и вращает в горизонтальном положении.
АНТРЕ — (франц. entree — вход, выход на сцену). Разыгрываемая клоунами буффонадная комическая сценка, с которой они выходят на манеж как с самостоятельным номером.
АП! (англ. up — вверх). Принятая в цирке условная команда, подаваемая одним из участников номера к выполнению или завершению упражнения или другого действия.
АПАЧ — (нем. Patsch — шлепок, пощечина). Ложная пощечина, исполняемая клоунами как игровой прием. Один из них незаметно для зрителей хлопает в ладоши, когда партнер наносит ему удар.
АППАРАТ (лат. apparatus — оборудование, снаряжение).
1. Специальные механические конструкции, включающие в себя систему электролебедок и моторов. Эти конструкции подвешиваются под куполом или устанавливаются на манеже (за манежем) и предназначаются для усиления зрелищного эффекта выступления артистов. Достигается это за счет технических особенностей аппарата: вращающихся, поднимающихся, раскачивающихся, спускающихся и тому подобных конструкций.
2. Сочетание нескольких снарядов, используемых в одном номере. Например, аппарат воздушного полета состоит из мостиков, трапеций, штамбортов, ловиторки.
АППОРТИРОВКА — (франц. apporter — приносить, привозить). Разновидность конной дрессировки, демонстрируемой обычно одной лошадью, которая исполняет различные своеобразные сценки шуточного характера. Например, приносит дрессировщику в зубах заданные ей предметы, спрятанные в манеже (платочки, цветок и др.) или в специальных ящичках, лежащих на барьере манежа, а также исполняет маленькие пантомимы: «лошадь в кровати», «лошадь в ресторане» и др.
АРАПНИК — (польск.). Длинный хлыст на коротком кнутовище. Арапник применяется в джигитовке и в номерах с хищными и крупными животными, т.к. громкое щелкание кончиком арапника побуждает лошадь к быстрому бегу, а большого хищника — к действию.
АРАБЕСК — (франц. arabesgue — буквально — арабский. Позы в классическом танце). Положение туловища, при котором тяжесть тела переносится на одну ногу, а другая отводится вперед или назад. Разной модификации арабеск используется в акробатике, гимнастике, эквилибристике.
АРАБСКИЕ ПРЫЖКИ — Акробатические прыжки, впервые показанные в Европе в 40-х гг. XIX в. арабскими акробатами. Отличаются своеобразной конфигурацией, высокой динамичностью исполнения. В нашем цирке получило распространение арабское колесо (колесо, выполняемое не в сторону, как обычно, а вперед) и арабское сальто (сальто в сторону).
АРНИР — (франц. — harnais — конская упряжь, сбруя). Два кожаных ремня, прикрепленных к гурту, которыми притягивают голову лошади к груди, что оказывает воздействие на ее ход в заданном ритме и придает шее красивый изгиб.
АТЛЕТИКА — (от греч. athletikos — свойственный борцам). Цирковой жанр, в котором демонстрация отлично развитой мускулатуры и трюковые упражнения с тяжестями (гирями, ядрами, штангой и др.) показываются артистом в художественно-образной форме как воспевание могущества человека, его физических и духовных качеств.
АТТРАКЦИОН — (франц. — attraction, буквально — притяжение).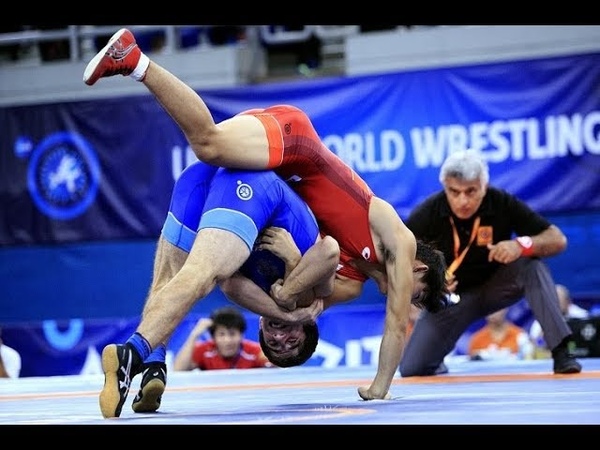 Особенно интересный и наиболее эффектный номер, занимающий центральное положение в программе и привлекающий внимание зрителей своими идейно-художественными качествами и высоким артистическим мастерством.
Особенно интересный и наиболее эффектный номер, занимающий центральное положение в программе и привлекающий внимание зрителей своими идейно-художественными качествами и высоким артистическим мастерством.
БАГЕТ — (франц. baguette — палочка) тонкий полуобруч в руках наездницы, через который она перепрыгивает, как через скакалку, стоя на бегущей лошади.
БАЛАГАН — (от перс. балахане – верхняя комната, балкон). Временное дощатое строение для цирковых и театральных зрелищ на народных гуляниях в старину.
БАЛАНСИР — (франц. balansier — качать, уравновешивать) длинный шест в руках канатоходца, с помощью которого он сохраняет равновесие на канате.
БАМБУК — (от малайского bambu — род тропического растения) снаряд для воздушной гимнастики, представляющий собой металлический шест, длиной 3-4 метра, подвешиваемый вертикально, на котором упражнения выполняются двумя гимнастами. Название снаряда от известного растения, толстый ствол которого когда-то использовался в Японии и Китае для изготовления першей, трапеций.
БАНОЛЛО — (от фамилии первого исполнителя упражнения, итальянского артиста Л. Банолло) гимнастическое упражнение — перелет с одного турника на другой с поворотом на 180 градусов в стойку на руках.
БАТОН — (франц. baton — посох, палка). Небольшая палка (стэк) с овальной подушечкой на конце или толстая бамбуковая палка, расщипленная на конце, для несильного, но звонкого удара.
БАТУТ (БАТУД) — (франц. batoud от итал. battuta — буквально — Удар). Подкидывающее устройство, представляющее собой частую сетку из прочной тесьмы, натянутую с помощью резиновых амортизаторов внутри металлической рамы на ножках или в виде сетчатой дорожки на металлических подставках, натянутой тросами и блоками к барьеру манежа.
БЕРЕЙТОР — (от нем. bereiten — объезжать, приготовлять лошадей). Наездник, специалист, объезжающий лошадей и обучающий верховой езде. В цирке — помощник дрессировщика.
БОГЕН — (нем. — bogen — дуга, арка, свод). Прогиб в спине, таксируемый при исполнении некоторых упражнений.
— bogen — дуга, арка, свод). Прогиб в спине, таксируемый при исполнении некоторых упражнений.
БУБЛИК — Небольшой кружок овальной формы, служащий опорой при выполнении стойки на голове. Изготовляется из пробки, ремня, пенопласта и подгоняется по форме головы исполнителя.
БУЛАВА — (от латин. bulla — металлический шарик). 1. Старинное орудие в виде тяжелой казенной или металлической головки на рукояти. 2. Предмет для гимнастических упражнений. Реквизит жонглера, напоминающий по форме видоизмененную модель булавы.
БУФФОНАДА — (итал. Buffonata — шутка, паясничество, шутовство). Прием художественного изображения в актерской игре, известный еще со времен древнегреческого театра, площадных представлений, в выступлении шутов в эпоху средневековья, Возрождения и в постановках итальянского театра масок. Основы цирковой буффонады — осязательное преувеличение как внешних черт клоуна, так и его действий, бутафории.
ВАЛЬСЕТ — (франц. valse — вальс). Темповой подскок, подпрыжка, применяемый как связующий элемент, вспомогательное действие для перехода к выполнению прыжка.
valse — вальс). Темповой подскок, подпрыжка, применяемый как связующий элемент, вспомогательное действие для перехода к выполнению прыжка.
ВЕНТРОЛОГИЯ — (латин. venter — живот, Logos — слово, речь. Старинное название — чревовещание, то есть «вещание животом», от славянского чрево — живот). Искусство говорить без артикуляции губ. На этом приеме строится разговорная сценка артиста с куклой.
ВОЛЬТ — (франц. volte — поворот). Элемент конной дрессировки — плавный круговой поворот лошади на месте.
ВОЛЬТИЖ — (от франц. voltiger — порхать)
1. Конный вольтиж — выполнение различных упражнений на лошади, бегущей по манежу в быстром темпе: седы, перемахи, висы за ногу, стойки, перевороты и т.п.
2. Акробатический вольтиж — разновидность акробатики, основанной на приёмах подбрасывания и перебрасывания верхнего нижним или нижними, осуществляемые только мускульно-темповыми усилиями без применения подкидывающих приспособлений (прежнее название «ханд-вольтиж» от нем. Hand — рука).
Hand — рука).
3. Гимнастический вольтиж — упражнения на раскачивающейся трапеции, а также отрывные упражнения в парной работе гимнастов на рамке, бамбуке, доппель-трапе.
ГЕРАДЕШВУНГ — (нем. Gerade — прямая линия, нем. Schwung — взмах, полет — швунг ) — Гимнастическое упражнение, прямой (гладкий) перелет с одного снаряда на другой или в руки к ловитору.
ГИМНАСТИКА — (греч. gimnastike от gymnazo — упражняю, тренирую) — цирковая гимнастика — это жанр, сущность которого состоит в демонстрации в художественно-образной форме достижений физического развития человеческого тела. При этом используются гимнастические снаряды, применяемые в цирке.
ГРЕЧЕ — (нем. Gratsche — спортивная позиция: ноги врозь). Гимнастическое упражнение — из виса на сближенных руках в каче гимнаст махом поднимается в сидячее положение на турник, держа ноги врозь, и «в темп» перелетает на другой турник или выполняет с турника заднее сальто на сход. Упражнение выполняется и в парной работе гимнастов на рамке, но с перехватом руками в верхней точке взлёта.
Упражнение выполняется и в парной работе гимнастов на рамке, но с перехватом руками в верхней точке взлёта.
ГРОТЕСК-НАЕЗДНИЦА — (франц. grotesque — причудливый, комичный) — наездница, выполняющая на скачущей лошади танцевально-акробатические и прыжковые элементы.
ГРУППИРОВКА — (от франц. grouper — соединять, группировать, нем. Gruppierung — группировка) — положение туловища, при котором ноги, предельно согнутые в коленях и тазобедренных суставах, удерживаются руками ниже колен.
ГУРТ — (нем. Gurt — пояс, кушак) — род подпруги, опоясывающий лошадь ниже холки, с двумя поручнями, за которые наездник держится руками при выполнении упражнений в конно-акробатических номерах.
ДА КАПО — (итал. da capo — повторение). Трюк или реприза, исполняемые артистом как добавление к номеру после выхода на аплодисменты.
ДОППЕЛЬ-ТРАПЕ — (нем. doppel — двойной, двоякий). Гимнастический снаряд — широкая металлическая перекладина, подвешиваемая на трех веревках (с тросом внутри), из них средняя разделяет перекладину на две трапеции, на которых двое гимнастов (гимнасток) выполняют упражнения как по отдельности на каждой, так и вместе на одной из них.
ДРЕССИРОВКА — (франц. dresser — обучение животных, выездка лошадей). Цирковой жанр, основанный на показе животных, зверей, птиц, проделывающих различные действия, достигнутые в результате выработки у них стойких условных рефлексов на команды дрессировщика.
ДЬЯБОЛО — (франц. diabolo — старинная детская игра с конусообразными волчками). Номер, в котором демонстрируются различные конфигурации быстро вращающихся волчков, напоминающих по форме увеличенные катушки, сильно раскручиваемые при помощи тонкого шнура с двумя ручками на концах наподобие детской скакалки.
ЖАНР — (франц. genre — род, вид). Цирковой жанр — исторически сложившаяся совокупность номеров, характеризующихся определенными выразительными средствами и только им присущими действенными признаками.
ЖОКЕЙ — (англ. jockey — наездник на бегах, скачках). Артист, исполняющий акробатические упражнения на лошади, бегущей по кругу манежа. Жокейская работа выполняется также вдвоем и группой.
Жокейская работа выполняется также вдвоем и группой.
ЖОНГЛИРОВАНИЕ — (франц. jongleur от лат. Joculator – шутник, забавник, остряк). Жанр, в котором артист демонстрирует искуссное умение подбрасывать и ловить предметы в определенной последовательности и в установленном ритме, а также балансировать их.
ЗЕРКАЛО — Специальный обруч, обклеенный бумагой, сквозь который наездник (наездница) прыгает, прорывая бумагу. Применяется для этой цели в акробатических номерах.
ЗИТЦЕН-ТРЮК — (нем. sitsen — сидеть, см. трюк). Гимнастическое упражнение — перелет с одного турника на другой с поворотом на 180° в сидячее положение.
ЗУБНИК — Кованый язычок с утолщением в средней части по конфигурации полости рта, приспособленный для выполнения различных упражнений: виса в зубах, удерживания партнера, стойки («стойка в зубнике»).
ИЛЛЮЗИОНИСТ — (от лат. illusio — ошибка, заблуждение, обман зрения, вызванный искаженным восприятием). Артист, демонстрирующий различные фокусы с помощью специального реквизита, аппаратов, снабженных секретными устройствами, скрытыми от зрителей, а именно: замысловатые появления, исчезновения, превращения, перемещения различных предметов, животных, людей, основанные на обмане зрения, применении отвлекающих маневров и ловкости самого исполнителя, его ассистентов.
Артист, демонстрирующий различные фокусы с помощью специального реквизита, аппаратов, снабженных секретными устройствами, скрытыми от зрителей, а именно: замысловатые появления, исчезновения, превращения, перемещения различных предметов, животных, людей, основанные на обмане зрения, применении отвлекающих маневров и ловкости самого исполнителя, его ассистентов.
ИМИТАТОР — (от лат. imitatio — подделка, подражание). Артист, владеющий искусством подражать различным звукам: пению птиц, звучанию музыкальных инструментов, голосам животных и т.п., что достигается соответствующей тренировкой голосового аппарата в сочетании с применением специально выработанных приемов.
КАБРИОЛЕТ — (франц. cabriolet). Легкий двухколесный экипаж на высоких колесах, в который запрягается лошадь, выполняющая школьные аллюры под управлением дрессировщицы, сидящей в кабриолете. Используется и в других номерах («акробаты на кабриолете», «жонглеры не кабриолете»).
КАБРИОЛЬ — (франц. cabriole — скачок).
cabriole — скачок).
1. В дрессировке — прыжок лошади с поджатыми передними ногами и вытянутыми задними.
2. В парной акробатике — нижний рывком поднимает верхнего в стойку на руках из кача между ног группировке.
3. В гимнастике — гимнаст, вися на рамке на подколенках, удерживает в каче партнера, который махом назад выполняет выкрут прямым туловищем между рук гимнаста.
КАСКАД — (франц. cascade — небольшой водопад, низвергаемый уступами).
1. В акробатике — прыжок-падение на спину (задний каскад) или лицом вниз (передний), исполняемый из разных положений: с места, с разбега, с высоты. Преимущественно применяется в выступлении эксцентриков, клоунов.
2. В жонглировании — прием перебрасывания предметов из одной руки в другую по одной определенной траектории.
КАУЧУК — (англ. caoutchouc, от исп. caucho, от перуанcк. — упругое вещество, добываемое из некоторых растений для промышленных целей). Разновидность акробатики, основанной на демонстрации предельной гибкости тела при сгибании назад («мостик»).
КИППЕ — (нем. kippe — качели). Гимнастическое упражнение на турнике — подъем из виса на руках в упор при небольшое исходном каче.
КЛИШНИК — (от фамилии английского артиста Э.Клишнига). Артист, демонстрирующий с помощью специально подобранных упражнений предельную гибкость тела при сгибании вперед («складка»).
КОПФШТЕЙН — (нем. stehen — стоять). Равновесие в стойке на голове.
КЛОУН — (англ. clown, от лат. colonus — человек .из простонародья, нерасторопный простофиля, деревенщина). Традиционный персонаж цирка, выступающий с комическими репризами, шуточными сценками. Соответственно различным видам клоунады различны и амплуа клоунов: буффонадные, музыкальные, клоуна- дрессировщики, коверные клоуны.
КОЛОННА — (франц. colonne — вертикальная опора, от лат. columna — столб). Акробатическая пирамида из трех человек, стоящих на плечах друг друга. Соответственно положению каждого из них в колонне, они именуются: нижним, средним и верхним. При сольном количестве участников пирамиду называют «колонна из четырех», «колонна из пяти». В отдельных упражнениях (заднее сальто на колонну или заднее сальто с колонны на колонну) профессионалы именуют колонной пирамиду из двух человек.
При сольном количестве участников пирамиду называют «колонна из четырех», «колонна из пяти». В отдельных упражнениях (заднее сальто на колонну или заднее сальто с колонны на колонну) профессионалы именуют колонной пирамиду из двух человек.
КОПФШПРУНГ — (нем. Kopf — голова, sprung — прыжок). Акробатический элемент — переворот прыжком вперед с опорой на голову или с опорой одновременно на голову и на руки.
КОРД-ДЕ-ВОЛАН — (франц. corde — веревка, шнур, канат, volant – развевающийся, летучий). Гимнастический снаряд — толстый канат, подвешиваемый горизонтально за оба конца так, что образуется провис, в середине которого артист выполняет упражнения как на месте, так и в раскачке.
КОРПАТУРА — (от итал. corporatura — тело, телесное). Расслабленное состояние при легком болевом ощущении во всем теле или в отдельных мышцах, вызванное их переутомлением.
КРАФТ-АКРОБАТЫ — (нем. Kraft — сила). Акробаты, выполняющие упражнения только силовыми приемами ( силовые акробаты ).
КРАФТ-ЖОНГЛЕРЫ — Атлеты, жонглирующие тяжестями: гирями, ядрами и другими предметами (силовые жонглеры).
КРУП — (франц. croupe). Наиболее широкая часть спины лошади, используемая наездниками при выполнении элементов конной акробатики.
КУЛЬБИТ — (франц. culbute — кувырок, кувыркание). Переворот вперед или назад перекатом через голову. Исполняется с места, а также прыжком с разбега.
КУПЕ — (франц. — coup — толчок, удар). Положение в акробатике, из которого низкий или средний подбрасывает верхнего, стоящего на соединенных руках партнера лицом к нему.
КУРАЖ — (франц. courage — смелость, храбрость). Высокие волевые качества, проявляемые артистом при выполнении сложных, опасных трюков.
КУРС — (лат. cursus — бег, движение). Прыжок жокея с разбега на скачущую лошадь, при котором он встает на круп.
КУРБЕТ — (франц. courbette — прыжок, скачок).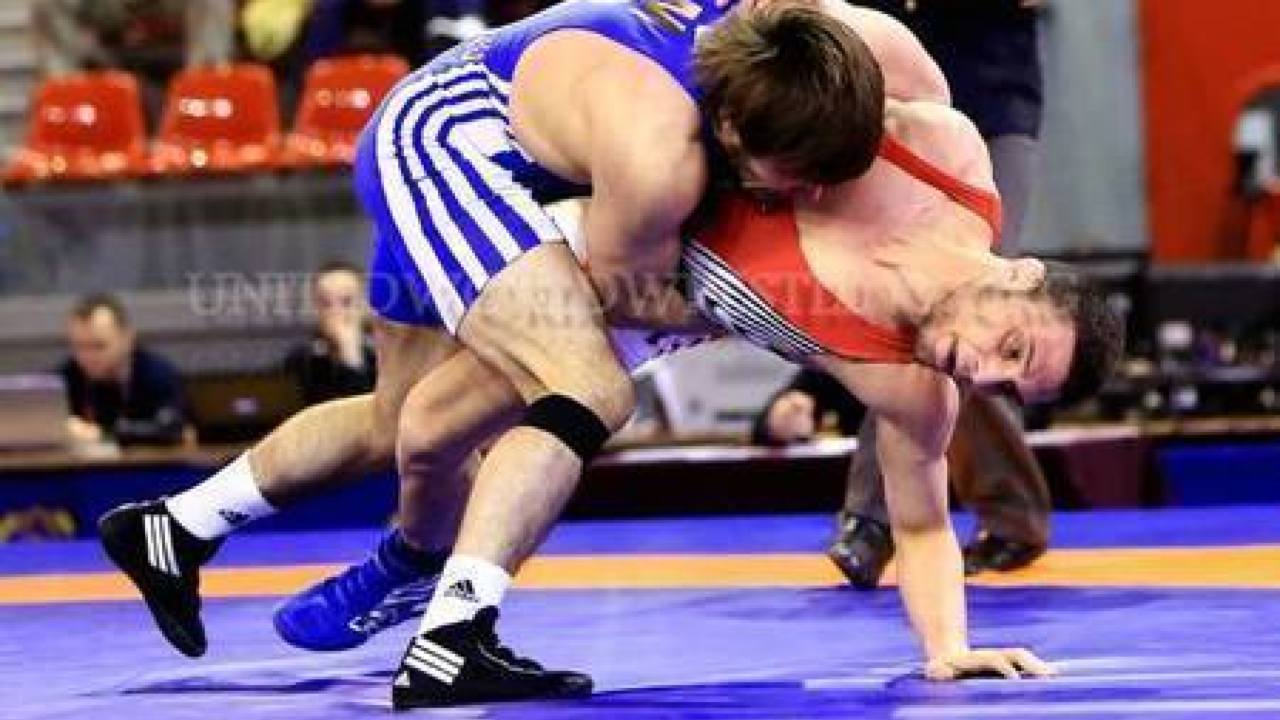 Акробатический элемент — прыжок: из стойки на руках встать на ноги.
Акробатический элемент — прыжок: из стойки на руках встать на ноги.
ЛОВИТОР — Участник гимнастического номера, который в висе на подколенках на короткой трапеции или рамке (ловиторке) принимает (ловит) партнера, перелетающего к нему с трапеции или с турника.
ЛОНЖА — (франц. longe — повод, веревка).
1. Длинный повод, на котором гоняют лошадей в период выездки и дрессировки.
2. специальное приспособление, предохраняющее от падений, ушибов во время тренировки или выступлений, представляющее собой веревку (или трос), пропущенную через подвесной блок, один ее конец удерживает пассировщик, другой пристегивается карабином к поясу исполнителя (одинарная лонжа). Двойная лонжа — две веревки, пропущенные через два блока, висящих на расстоянии друг от друга, или поясная лонжа — пояс с двумя короткими веревками по бокам, удерживаемыми двумя пассировщиками.
ЛОПИНГ — (англ. Looping the loop — мертвая петля по сомкнутому кругу). Вращение гимнаста вокруг штамборта, к которому его ноги прикреплены специальными выступами в подошвах обуви, входящими в прорези вращающейся втулки на штамборте. Другой способ вращения — перевороты вокруг штамборта, стоя на прикрепленной к нему трапеции, имеющей жесткие стропы.
Вращение гимнаста вокруг штамборта, к которому его ноги прикреплены специальными выступами в подошвах обуви, входящими в прорези вращающейся втулки на штамборте. Другой способ вращения — перевороты вокруг штамборта, стоя на прикрепленной к нему трапеции, имеющей жесткие стропы.
ЛЯГСКАЧ — Подъем-вскок из положения лежа согнувшись на лопатках, выполняемый за счет резкого разгиба ног в тазобедренных суставах и толчка руками от пола у плеч.
МАНЕЖ — (франц. manege — помещение для обучения верховой езде и выездки лошадей). Круглая площадка в центре зрительного зала цирка, имеющая 13 м. в диаметре, на которой происходит представление.
МАНИПУЛЯТОР (ПРЕСТИДИЖИТАТОР) — (лат. manus — рука, итал. presto — быстро, dijito — палец). Артист, исполняющий фокусы с небольшими предметами (картами, шариками, монетами, лентами, цветами, платочками и т.п.) за счет виртуозной техники пальцев и отличной координации движений тренированных рук.
МЕЛАНЖ-АКТ — (франц. melange — смешение, acte — действие). Номер, состоящий из элементов различных жанров, из которых ни один жанр не является преобладающим.
МНЕМОТЕХНИКА (МНЕМОНИКА) — (греч. mneme — память, techne -искусство: искусство запоминания). Номер, в котором демонстрируется искусство запоминания. Один исполнитель, находясь в зрительном зале, с помощью специального устного кода, изменения интонации, обусловленных фраз («скажите скорее», «что задувал гражданин» и т.п.) и других приемов передачи, сообщает своему партнеру, находящемуся на манеже (сцене), заданные зрителям вопросы (знаменательные даты, имена знаменитых деятелей, события, номера купюр и т.п.), на которые следуют быстрые ответы.
МОНОЦИКЛ — (греч. mono — один, ziole — колесо). Одноколесный велосипед, применяемый в велономерах для выполнения на нем различных трюков.
НОМЕР — Так именуется художественное произведение циркового искусства, представляющее собой совокупность трюков, исполняемых в определенной композиционной последовательности, которые в сочетании с другими специфическими средствами выразительности, отражают идейно-творческую задачу и оказывают эмоциональное воздействие на зрителей. Термин возник во второй половине XIX в. и обозначал порядок выступления артистов в балетно-оперных дивертисментах.
Термин возник во второй половине XIX в. и обозначал порядок выступления артистов в балетно-оперных дивертисментах.
ПА-ДЕ-ДЕ — (франц. Pas de deux — танец вдвоем). Конный номер, состоящий из балетно-акробатических поддержек, исполняемых наездником и наездницей на двух лошадях, бегущих рядок по кругу манежа.
ПА-ДЕ-ТРУА — (франц. Pas de trois — танец втроем). Конный номер, в котором акробатические поддержки и пирамиды исполняются тремя артистами на трех лошадях, бегущих рядом по кругу манежа.
ПАННО — (франц. Panneau — плоскость). Плоская твердая площадка-матрас, покрывающая спину лошади. Применяется в некоторых конных номерах как удобная опора для наездников.
ПАНТОМИМА ЦИРКОВАЯ — (греч. pantos — все, mimein — выражать). Цирковое театрализованное представление с определенным сюжетом, объединяющим номера разных цирковых жанров, в которой характер действующих лиц и содержание пантомимы выражены жестом, мимикой, телодвижениями, трюками.
ПАРАД-ПРОЛОГ
1. Торжественный выход-марш всей труппы перед началом представления с приветствием, обращенным к зрителям.
2. Вступительная часть представления с небольшим сюжетом, посвященный какой-либо дате, событию.
ПАРФОРСКАЯ ЕЗДА — (франц. Par forse , букв. – через силу). Конный номер, исполняемый наездником (наездницей), стоящим на лошади, перепрыгивающей на быстром, ходу через различные препятствия (барьеры, ленты и т.д.).
ПАССАЖ — (франц. passage — переход, проход, перелет).
1. В акробатике — заданное направление полета акробата с подкидной доски, трамплина, с рук нижних как в прямом, так и во встречных направлениях.
2. В гимнастике – встречный перелет вольтижеров в полете, на турниках.
3. В верховой езде — ритмичное поднимание лошадью передней и задней ног по диагонали на короткой рыси.
ПАССИРОВКА — (франц. passage – передавать, переправлять, переходить). Быстрые, ловкие действия, облегчающие выполнение разучиваемых упражнений или предохраняющих от падений, ушибов (подтолкнуть, придержать, схватить), а также умение в нужный момент отвести или подвести ленты, обруч, когда через них прыгает наездник (наездница).
ПЕРШ — (франц. perche, анг. perch — шест, жердь). Снаряд для эквилибристики — длинная дюралюминевая труба с различными приспособлениями и устройствами, балансируемая артистом на лбу, на плечах, на поясном упоре и в зубнике. На вершине перша партнер (партнеры) выполняют упражнения.
ПИРУЭТ-САЛЬТО — (франц. Pirouette — поворот, оборот, см. сальто). Сальто, выполненное с одновременным вращением тела акробата на 360° относительно продольной оси.
ПИСТА — (франц. piste — скаковая дорожка). Узкая, трекоподобная дорожка у барьера манежа, служащая опорой для бегущей лошади, позволяющая ей сохранить определенный наклон корпуса, необходимый для устойчивости наездника.
ПЛАНШ — (франц. planche — доска, гладкая поверхность).
1. Горизонтальное положение туловища, удерживаемое силой в висе или в упоре на гимнастических снарядах. Задний планш – лицом вниз, передний — лицом вверх.
2. Выпрямленное туловище (а не группированное) при выполнении сальто (сальто планшем) или при силовом выходе в стойку на руках (стойка планшем).
ПОНИ — (англ. pony — маленькая лошадь). Порода малорослых лошадей, используемых в номерах конной дрессировки и в смешанных группах животных.
РЕПРИЗА — (франц. reprise — возобновление, повторение). В цирке — короткая словесная шутка или смешное действие в выступлении клоунов.
РИЗЕНВЕЛЛЕ — (нем. risen — огромный, громадный, Velle — волна). Гимнастическое упражнение — большие обороты вокруг турника на выпрямленных руках. Среди любителей спорта упражнение известно под названием «солнце».
РОНДАД, РУНДАД — (франц. rond — круг, нем. rund — круглый). Элемент прыжковой акробатики — переворот с поворотом, служащий связующим звеном для перехода от разбега к прыжкам, выполняемым спиной по направленно разбега.
САЛЬТО — (итал. salto — прыжок, скачок). Акробатический прыжок — безопорное вращение тела вперед или назад, или в сторону с полным переворачиванием через голову. Выполняется в группировке или с прямым туловищем, с места или с разбега, а также с помощью подбрасывающих приемов или подкидывающих устройств.
САНЖИРОВКА — (франц. changer — менять, обменивать, заменять)
1. Ловкие, быстрые действия фокусника, умело и незаметно подменяющего предметы во время манипуляции ими или создающего обманчивое впечатление замены, которой на самой деле не было.
2. В гимнастике — темповый поворот на 180° махом вперед на турнике или в полете.
3. В дрессировке — изменение направления хода лошади или группы лошадей, выполняемое по команде дрессировщика («санже!»).
СВОБОДА (СВОБОДНАЯ ДРЕССИРОВКА) — Одна из форм показа группы дрессированных лошадей, выступающих под управлением дрессировщика, но свободных от управления наездниками.
СКОМОРОХИ — (бродячие музыканты, плясуны, комедианты). Странствующие актеры в Древней Руси, выступавшие на улицах, площадях. ярмарках и показывающие элементы дрессировки, звукоподражания, игру на музыкальных инструментах, жонглирование, а также сатирические разговорные сценки и песни. Являются основоположниками отдельных видов зрелищ и некоторых жанров цирка в России.
СТРЕКАСАТ — (итал. strecatschere — удлинение, растяжение). Способ выполнения некоторых прыжков, позволяющий акробату продвигаться в сторону, противоположную перевороту.
СУПЛЕСС — (франц. souplesse — гибкость, податливость). Резкое сгибание туловища броском назад за счет сильного прогиба в пояснице.
ТАБЛО — (франц. tableau — картина). Общий вид большой группы дрессированных лошадей, выполняющих в единой композиции, различные фигурные построения, перестроения по манежу, на тумбах, вокруг них и т.п.
ТАНДЕМ — (англ. tandem -двухместный, двухколесный велосипед, приводимый в движение обоими ездоками, сидящими один за другим; упряжка лошадей, следующих цугом — одна впереди другой). Разновидность школьной езды на двух-трех лошадях, идущих по манежу друг за другом. Наездница, сидя верхом на последней лошади, направляет ход впереди бегущих лошадей с помощью длинных поводьев, заставляя проделывать различные повороты, которые повторяет лошадь с седоком.
ТВИСТ — (англ. twist — крутить, скручивать). Акробатический прыжок — переднее сальто, выполненное после поворота на 190°.
ТРАПЕЦИЯ — (греч. trapesion — четырехугольник с неравными сторонами, букв. — столик). Гимнастический снаряд — металлическая перекладина, подвешиваемая горизонтально на двух веревках (с тросом внутри), прикрепленных к ней по краям. Упражнения выполняются в висе и в упоре как на неподвижной, так и на раскачивающейся трапеции.
ТРЕНЗЕЛЬ — (нем. Trense — удила). Железные удила, которые при натягивании прикрепленных к ним поводьев упираются в нёбо лошади, заставляя ее поднимать голову, останавливаться, поворачиваться.
ТРИНКА — Старинное название специального устройства, на которой артист лежит с поднятыми ногами при исполнении номеров антипода, икарийских игр, балансировании перша или лестницы на ногах. По некоторым сведениям название произошло от количества традиционных предметов, какими пользовались антиподисты прошлых времен (бельгийский крест, шар и бочка). В настоящее время больше поменяется название «антиподная подушка».
В настоящее время больше поменяется название «антиподная подушка».
ТУРНИК — (франц. tourner — вертеть, вращать, перевертывать). Древнейший гимнастический снаряд — перекладина из стального прута, обклеенная специальной лентой. Укрепляется горизонтально на двух металлических вертикальных стойках, которые неподвижно крепятся тросами, и блоками к барьеру манежа.
УНИФОРМИСТЫ — (нем. uniform — форменная одежда, мундир). Специально обученные работники, обслуживающие номера по установке реквизита, аппаратов, снарядов, участвующие в пассировке и уходу за манежем.
ФОКУС — (нем. Hokus-pokus- уловка). Ловкая трюковая проделка фокусника, поражающая своей кажущейся сверхестественностью, в основе которой ловкость рук артиста, техника специальной аппаратуры, реквизита, а такие обман зрения и отвлекающие приемы.
ФЛИК-ФЛЯК — (франц. flic-flac » шлёп, хлоп). Акробатический элемент — переворот прыжком назад прогнувшись с промежуточной опорой на руки.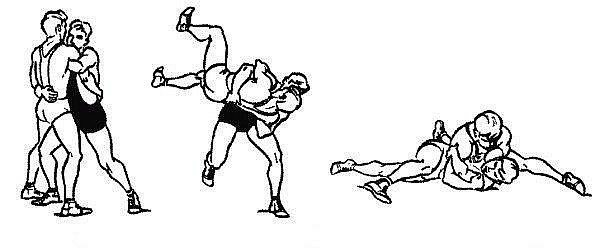
ЦИРК — (от лат. circus, букв. — круг).
1. Вид искусства.
2. Здание с манежем, где даются цирковые представления.
ЧЕПРАК — Войлочная или брезентовая накидка, надеваемая на спину лошади при исполнении конно-акробатических номеров. Чепрак посыпается канифолью против скольжения.
ШВУНГ — (нем. schwung — взмах, полет). Резкий рывок всем туловищем или одними ногами для увеличения маха, кача.
ШТАМБОРТ — (нем. stamm — ствол, bord — край). Металлическая перекладина, которая подвешивается горизонтально за края и укрепляется неподвижно растяжками. К ней подвешиваются снаряды и аппараты цирковых номеров. Также используется для номера «акробаты на штамборте».
ЭКВИЛИБРИСТИКА — (лат. aeguilibris — находящийся в равновесии). Цирковой жанр, в основе которого демонстрация искусства сохранения равновесия в различных условиях, усложненных применением специального реквизита и снарядов.
мы из «Мангуста»! – Учительская газета
Как часто момент, который пугал сильнее всего, оборачивается радостью: я сделал это! Каждый хоть раз да испытал это чувство, но, кажется, у спортсменов подобные всплески восторга после напрасного страха, граничащего с отчаянием: «Ну в этот раз я точно не смогу», случаются ярче стократно. Горят глаза малышей от первых побед, гордятся своими успехами ребята постарше – достижение лучшего, чем в прошлом бою, результата придает им уверенности и рождает уважение к себе. И вот что странно: мальчишки и девчонки приходят заниматься борьбой, чтобы научиться быть сильными физически, а обретают чувство внутреннего достоинства оттого, что крепнут нравственно. Подобная метаморфоза не обошла стороной и воспитанников угличского клуба смешанного боевого единоборства «Мангуст».
Прошлый год стал для «Мангуста» триумфальным. «Серебро» и «бронзу» ребята привезли из Афин с первенства мира среди юношей и девушек до 15 лет, который проходил в знаменитом Olympic Sport Hall. Они завоевали два первых и два вторых места в Москве во Всероссийском юношеском турнире по джиу-джитсу JJIF «Кубок космонавтов» в дисциплине «не-ваза» (правила UAEJJF). Второе место удалось снискать и в голландском Амерсфоорте (Fitness Academy Bokkeduinen), где прошли Кубок Европы по джиу-джитсу среди юношей и девушек до 15 лет и международный турнир по джиу-джитсу Dutch Open. Впрочем, соревнования проходят у этих юных борцов почти каждую неделю, состязания того или иного уровня проводят город, регион, Федерация джиу-джитсу. Возможность блеснуть есть. Так же как и есть вероятность не выложиться в полную силу, упустить свой шанс на успех, потерпеть поражение. Так тоже бывает, и не только в спорте. И не только потому, что верховодит принцип «главное – не победа, а участие». Просто шаг вперед порой бывает невыносимым, и стоит немного помедлить, чтобы его сделать.
Они завоевали два первых и два вторых места в Москве во Всероссийском юношеском турнире по джиу-джитсу JJIF «Кубок космонавтов» в дисциплине «не-ваза» (правила UAEJJF). Второе место удалось снискать и в голландском Амерсфоорте (Fitness Academy Bokkeduinen), где прошли Кубок Европы по джиу-джитсу среди юношей и девушек до 15 лет и международный турнир по джиу-джитсу Dutch Open. Впрочем, соревнования проходят у этих юных борцов почти каждую неделю, состязания того или иного уровня проводят город, регион, Федерация джиу-джитсу. Возможность блеснуть есть. Так же как и есть вероятность не выложиться в полную силу, упустить свой шанс на успех, потерпеть поражение. Так тоже бывает, и не только в спорте. И не только потому, что верховодит принцип «главное – не победа, а участие». Просто шаг вперед порой бывает невыносимым, и стоит немного помедлить, чтобы его сделать.
Завоевано трудом
– Я боролся и ни капельки не вспотел! – хвалится малыш.
– Значит, мало выкладывался, плохо старался, – остужают его пыл болельщики.
Для того чтобы перестать жалеть себя, преодолеть страх и выложиться на все сто, нужно, во-первых, захотеть, а во-вторых, понять, зачем это тебе нужно. Лавровый же венец не всегда сразу находит голову героя, иногда к славе приходится продираться сквозь тернии. Но они делают этот шаг и следующий и даже не замечают, как искусство рукопашного боя изменяет их привычки, формирует характер.
«Только дисциплина и последовательность действий. Я обязан этим вещам всеми моими достижениями в жизни. Ничего не происходит в одночасье. Мои результаты – это следствие многолетней работы над собой», – говорил Карлос Грейси-младший, мэтр бразильского джиу-джитсу. А еще добавлял: «Основная цель моей семьи, семьи спортсменов и бойцов, – делиться искусством, которое приносит людям огромную пользу. Мой отец был приверженцем естественного образа жизни и духовной личностью, чьим огромным желанием было передать свое знание другим, чтобы они также могли извлечь пользу из джиу-джитсу. С детства, воспитываясь в такой обстановке, я понял, что джиу-джитсу – это на самом деле один из методов самосовершенствования человека. Я очень горжусь тем, что делом моей жизни стало создание организации, которая концентрируется не только на формировании спортсменов или учителей, но также помогает людям формировать свой характер».
Я очень горжусь тем, что делом моей жизни стало создание организации, которая концентрируется не только на формировании спортсменов или учителей, но также помогает людям формировать свой характер».
Формировать характер помогают не только тренировки, на соревнованиях случаются потрясающие встречи с теми, кто служит для этих ребят эталоном, с кумирами, на которых хочется равняться. Вот не далее как в декабре воспитанники угличского клуба на чемпионате ADCC Moscow Kids Open познакомились с Джеффом Монсоном, двукратным чемпионом мира, легендой ММА. Он наградил всех победителей, расписался на грамотах, сфотографировался со всеми желающими!
И все-таки прежде всего ребятам из «Мангуста» хочется равняться на своего тренера Евгения Юрьевича Глузгала. Нет упражнения, которое он не смог бы выполнить сам. Нет ситуации, в которой он не оказался бы на высоте благодаря чувству юмора, спокойствию, внутренней силе.
Со школьниками Евгений Глузгал занимается давно. Даже будучи членом команды пожарной части, в свободное время он тренировал юных спортсменов. Наверное, на желание учить мальчишек и девчонок тому, что умеешь сам, повлияли его собственные воспоминания: юношей он ходил в подобный клуб и в военно-спортивном клубе «Спарта» осваивал азы военной подготовки перед службой в армии. Стоит ли удивляться, что подкованного в теории, уравновешенного, с хорошей физической подготовкой парня призвали в Военно-воздушные силы?!
Наверное, на желание учить мальчишек и девчонок тому, что умеешь сам, повлияли его собственные воспоминания: юношей он ходил в подобный клуб и в военно-спортивном клубе «Спарта» осваивал азы военной подготовки перед службой в армии. Стоит ли удивляться, что подкованного в теории, уравновешенного, с хорошей физической подготовкой парня призвали в Военно-воздушные силы?!
Они готовятся к бою – рычаг локтя
Сегодня клуб «Мангуст» вся его жизнь. Здесь тренируется младший сын Даниил, у которого, кстати, несмотря на весьма нежный возраст, за плечами уже тоже немало серьезных побед. Сюда приводят своих детей те, кто хочет, чтобы из их отпрысков получилось что-нибудь путное. И те, кто осознает, как тяжело справиться в одиночку с растущим бесенком в ребенке. Поэтому зачастую клуб борцовского искусства превращается в клуб психологической помощи, родителям в первую очередь. В результате они все становятся одной большой семьей, где делятся сомнения на всех, где празднуют достижения как общую победу. А еще ходят в совместные походы.
А еще ходят в совместные походы.
– Родители наших воспитанников, глядя на своих детей, тоже себя перестраивают, начинают вести здоровый образ жизни и заниматься спортом. У нас даже сложился своеобразный коллектив из учеников, их наставников, родителей и тех, с кем наши ребята обычно сражаются за победу на различных областных соревнованиях. Мы вместе традиционно летом ходим в походы, люди специально к этому событию приурочивают отпуска, не редкость, когда в нашей вылазке с палатками участвуют больше 150 человек! И моя жена Люба с Даней, естественно, всегда с нами.
Евгений Юрьевич говорит, с теми, с кем ребята обычно сражаются на соревнованиях, они ходят в походы. И не только. Они становятся друзьями, настоящими. Как это произошло с Эдуардом Волченковым, руководителем аффилированного клуба «Максимус»/Lion Academy и Ярославского регионального отделения ADCC Russia, президентом Ярославской областной федерации джиу-джитсу. Сегодня они вписывают в историю славных результатов юных российских спортсменов свои страницы вместе.
Ребята, овладевающие азами боя, проворные, ловкие, бесстрашные, словно зверек, давший имя их клубу. Они могут многое. Но джиу-джитсу – это искусство, где маленький человек вполне способен победить большого, потому что независимо от того, какой силой обладает «великан», это не спасет его от поражения, если он уступает сопернику по нравственным качествам.
«Пояс прикрывает лишь несколько сантиметров твоего «бампера», остальное придется доказывать делом», – смеется Ройс Грейси, мастер бразильского джиу-джитсу, особо важная персона, входящий в Зал славы UFC и считающийся одной из наиболее влиятельных фигур в истории ММА. Да, не пояс дает тебе авторитет, уважение к себе ты заслуживаешь своими поступками. Ребятам из «Мангуста» не придет в голову повышать свою значимость в глазах сверстников, обижая слабых, используя свои знания для устрашения беспомощных. Они знают цену своей силе и то, что она проявляется не только внешне.
Михаил КУЗМИНСКИЙ (фото),
Углич, Ярославская область
«Имидж непримиримого и очень последовательного борца с режимом для Удальцова важнее»
Сергею Удальцову грозит большой срок, если его признают виновным в организации массовых беспорядков в России. Об этом в эфире «Коммерсантъ FM» заявил политолог Леонид Радзиховский. Член оппозиционного координационного совета, экс-депутат Геннадий Гудков обсудил ситуацию с ведущим Андреем Норкиным.
Об этом в эфире «Коммерсантъ FM» заявил политолог Леонид Радзиховский. Член оппозиционного координационного совета, экс-депутат Геннадий Гудков обсудил ситуацию с ведущим Андреем Норкиным.
Следователи ждут у себя координатора «Левого фронта» 26 октября. Поводом для расследования стал фильм «Анатомия протеста-2», показанный каналом НТВ.
По данным газеты «Коммерсантъ», Удальцов не явится на допрос, а бежит из страны раньше этого времени. Однако адвокат оппозиционера Виолетта Волкова опровергла эту информацию в эфире «Коммерсантъ FM». Связаться с самим Удальцовым и его супругой до сих пор невозможно.
— Ваше мнение, придет Сергей Удальцов на допрос, или все-таки уедет из страны?
— Я думаю, что сложившийся имидж непримиримого и очень последовательного борца с режимом для Удальцова важнее. Я думаю, что он придет, безусловно. Тем более, если говорить юридическим языком, я внимательно еще раз просмотрел эту пленку, так называемую, которая неустановленным лицом передана неустановленным журналистам в неустановленном месте неустановленным образом и используется как главный аргумент организации массовых беспорядков 6 мая, хотя пленка записана в июне. Классная ситуация, традиционная, типичная для российского правосудия и политизированного следствия. Тем не менее, если говорить юридическим языком, я не вижу никаких оснований, которые бы свидетельствовали о подготовке массовых беспорядков. Во-первых, мы, к счастью, не знаем, что такое массовые беспорядки. Есть очень четкая юридическая формулировка этих массовых беспорядков.
Классная ситуация, традиционная, типичная для российского правосудия и политизированного следствия. Тем не менее, если говорить юридическим языком, я не вижу никаких оснований, которые бы свидетельствовали о подготовке массовых беспорядков. Во-первых, мы, к счастью, не знаем, что такое массовые беспорядки. Есть очень четкая юридическая формулировка этих массовых беспорядков.
— Геннадий Владимирович, а если не говорить четким юридическим языком, а говорить тем языком, к которому, в общем, многие привыкли уже в нашей стране, ему действительно может грозить большой срок?
— У нас ведь сажают не по закону, а по понятиям.
— Так я про это и спрашиваю, может быть, тогда слишком велика цена поддержания этого имиджа политического борца, может быть, не стоит?
— Есть законы общественного развития, в соответствии с одним из них, выведенных философами, когда в тюрьмах становится слишком много знаменитых людей, являющихся политическими оппонентами режима, с режимом происходит что-то плохое.
Я думаю, что в Кремле люди знают этот закон и знают это правило, и вряд ли они будут его пытаться реализовать в собственной стране, рискуя самими собой, как говорится. Поэтому я думаю, что поэтому и Навальный до их пор у нас на свободе. Поэтому и уголовное преследование не начато в отношении вашего покорного слуги. Хотя мне этим угрожали много раз и даже много раз предлагали уехать за рубеж, взять билет в одну сторону. Поэтому конечно, если по понятиям идти, можно посадить любого.
— Я сегодня спрашивал адвоката Удальцова Виолетту Волкову относительно планов или мыслей Удальцова по поводу политического убежища. Она сказала, что он даже физически не может уехать из страны, потому что под подпиской. Но ведь, с другой стороны, можно использовать способ Ассанжа, прийти на территорию любого посольства в Москве, и там попросить политическое убежище.
— Можно. Но я думаю, тогда нужно вообще говорить о переходе части радикального протестного движения на подпольное положение. Нужно ли это власти, не нужно – пусть они определятся. Потому что не сложно перейти на подпольное положение, не сложно отработать систему явок, конспиративных квартир, паролей и так далее, выбросить мобильные микрофоны, которые человек с собой носит, еще что-нибудь. Это не сложно все. Вопрос только, нужно ли это делать?
Нужно ли это власти, не нужно – пусть они определятся. Потому что не сложно перейти на подпольное положение, не сложно отработать систему явок, конспиративных квартир, паролей и так далее, выбросить мобильные микрофоны, которые человек с собой носит, еще что-нибудь. Это не сложно все. Вопрос только, нужно ли это делать?
Мы уже дошли до такой степени, что борьба приобретает такой характер. Или все-таки мы еще балансируем на грани относительного авторитарного режима, не переходящего в диктатуру. У меня, например, ответа на этот вопрос пока нет. Я все-таки как оптимист пока еще надеюсь, что мы балансируем на этой грани, не перешагивая ту ступеньку, которая отделяет авторитарный режим от диктатуры, которая начинает политические репрессии по беззаконию.
Идеальный мир божественной шоколадки | Филантроп
Притча о том, что бизнес с человеческим лицом — реальность. О том, что мир можно устроить так, чтобы люди относились друг к другу хорошо и сохраняли свое достоинство, а также о том, что зарабатывая на хлеб себе, можно позволить заработать другим.
Производители шоколада Divine убрали посредников, чтобы увеличить прибыль фермеров — производителей какао-бобов
Начало
В 1980-е годы на Западе получило развитие движение солидарности с борцами за независимость в Никарагуа. Солидарность эта выражалась в том числе и в поддержке никарагуанского кофе, поставляемого прямо от производителей. Однако этот кофе был ужасного качества, никому не нравился и в качестве средства политической борьбы категорически не годился: от него пришлось отказаться. А вот с ганскими какао-бобами дело обстоит по-другому – из них получается первоклассный шоколад, он отлично подходит для реализации идеи, которая легла в основу движения FairTrade («справедливая торговля»). В числе первых активистов, поддержавших права и интересы фермеров Ганы, оказался Александр Бэлфор. Вместе с другими он основал компанию Divine Chocolate, которой предстояло не только стать коммерчески успешной, но и перевернуть сознание потребителей и подорвать устои бизнеса.
Социальное предприятие Divine Chocolate
Александр Бэлфор
Бэлфор и Ко видели проблему в следующем. Компания Cadbury производит шоколад уже 150 лет, в результате она — астрономически богата и процветает, а ганские фермеры, поставляющие качественное сырье для этого самого шоколада, — такие же бедные, как и были. Как же так? Поразмыслив немного, они пришли к выводу, что основная стоимость шоколада Cadbury формируется за счет его бренда, а не качества содержимого упаковки. Поэтому для будущего предприятия главным было сделать так, чтобы бренд нового шоколада (а значит, и сам шоколад) принадлежал фермерам, а не посредникам, предоставить фермерам доступ к рынку, о котором они не имеют представления, и исключить из цепочки ловких посредников, злоупотребляющих неосведомленностью фермеров.
Стартового капитала у фермеров не было: их ежегодный доход составлял от $500 до $1000. В поиске новых партнеров с собственным капиталом инициативная группа обратилась к британскому правительству. Правительство отказалось предоставить кредит в виде денежных средств, но согласилось поддержать идейно – в рамках проводимой на тот момент политики экономического благоприятствования бедным странам и, особенно, бывшим колониям, а также в русле международных усилий, направленных на снижение бедности на Африканском континенте. Кроме всего прочего, такая поддержка давала реальные гарантии для получения коммерческих кредитов на бизнес. Был получен кредит в $5 млн у одного из британских банков. Последние давали займы под 2%-3% годовых в сравнении с 22%-35% ганских банков, что позволило новому предприятию сэкономить в первый год целый миллион. Так на свет появилась изумительная, божественная шоколадка Divine, которая была коммерчески успешна, во что изначально мало кто верил. Отменное качество шоколада – одно из условий успеха, превыше всего — его «социальность».
Правительство отказалось предоставить кредит в виде денежных средств, но согласилось поддержать идейно – в рамках проводимой на тот момент политики экономического благоприятствования бедным странам и, особенно, бывшим колониям, а также в русле международных усилий, направленных на снижение бедности на Африканском континенте. Кроме всего прочего, такая поддержка давала реальные гарантии для получения коммерческих кредитов на бизнес. Был получен кредит в $5 млн у одного из британских банков. Последние давали займы под 2%-3% годовых в сравнении с 22%-35% ганских банков, что позволило новому предприятию сэкономить в первый год целый миллион. Так на свет появилась изумительная, божественная шоколадка Divine, которая была коммерчески успешна, во что изначально мало кто верил. Отменное качество шоколада – одно из условий успеха, превыше всего — его «социальность».
В трактовке Бэлфора социальность это равноценная забота о партнерах и всех людях, участвующих в производстве шоколада, в осознании этой цепочки как чего-то единого. Социальное предприятие – некая политическая активность, которая к тому же приносит заработок. Это, скорее, политическая, чем бизнес модель; это образ и часть жизни, определенные принципы. Вопросы выстраивания бизнеса – существенны, но вторичны. Кому будет принадлежать бизнес – вот определяющий для социального предприятия вопрос. Divine существует с 1998 года и принадлежит кооперативу фермеров, который существует с 1992 года, т.е. он принадлежит народу.
Социальное предприятие – некая политическая активность, которая к тому же приносит заработок. Это, скорее, политическая, чем бизнес модель; это образ и часть жизни, определенные принципы. Вопросы выстраивания бизнеса – существенны, но вторичны. Кому будет принадлежать бизнес – вот определяющий для социального предприятия вопрос. Divine существует с 1998 года и принадлежит кооперативу фермеров, который существует с 1992 года, т.е. он принадлежит народу.
И даже распределение прибыли не самый приоритетный вопрос. Самым значимым достижением Divine считается изменение в подходах крупных компаний к организации бизнеса (об этом – ниже). Как правило, компании принимают решения, исходя из собственных, эгоистических интересов. В Divine тактика и стратегия были иными, и они победили, потому что Divine демонстрирует возможности более устойчивого типа бизнеса, бесперебойного снабжения какао-сырьем, а также формирования спроса у потребителей на продукты, которые производятся подобными «справедливыми» цепочками. Секрет крылся в том, что маржу получал кооператив фермеров, производящий какао-бобы, а не два других совладельца бизнеса, как обстоит дело в случае известных производителей шоколада.
Секрет крылся в том, что маржу получал кооператив фермеров, производящий какао-бобы, а не два других совладельца бизнеса, как обстоит дело в случае известных производителей шоколада.
Технология изменений
Divine Chocolate удалось добиться трех ключевых изменений. Первое, Бэлфор и Ко сделали так, чтобы в стоимостной цепочке шоколада фермеры заняли более высокие позиции. Если проще – за сырье фермерам они платили больше, чем это делали крупные компании; прибыль же передавалась кооперативу, объединявшему 30 тыс. фермеров. Еще проще: компания отказалась от своей маржи в пользу фермеров. Бедные стали богаче, и добиться этого оказалось не так сложно.
Второе, нужно было изменить практику выстраивания отношений, принятую в крупных компаниях. Объем британского шоколадного рынка в 1990-е измерялся £3 млрд., и он принадлежал, как и сегодня, трем крупнейшим производителям Mars, Cadbury и Nestle, которые контролируют до 85% рынка (для справки: оборот Divine составляет порядка $25 млн. – капля в море). Акциями с фермерами, понятно, никто делиться не собирался, но поднять плату за сырье – почему бы и нет?
– капля в море). Акциями с фермерами, понятно, никто делиться не собирался, но поднять плату за сырье – почему бы и нет?
Была разыграна небыстрая и тонкая политическая игра, задающая новые правила. Приходя в супермаркет, обычно покупатель задается вопросом: что я получу за свои деньги? Согласно Бэлфору и Ко., покупатель должен задавать другой вопрос — кто и что получает за мои деньги? Кто обогащается, когда я покупаю эту плитку шоколада? Шоколад Divine позволил потребителям задавать этот важный вопрос и отвечать на него разными способами. Таким образом, у покупки появился дополнительный смысл. Постепенно в сознании потребителя происходил сдвиг, и сегодня, спустя 15 лет после зарождения движения, потребитель активно интересуется происхождением товара (не только шоколада). Изменилось отношение к тому, что приобретается и потребляется.
Еще один важный момент. Подняв цены на поставляемое фермерами сырье, Divine поднял и этическую планку во всей бизнес-среде. И вот, в 2009-2010 Cadbury и Nestle заявили о частичном переходе во взаимоотношениях со своими поставщиками на принципы FairTrade и о добровольном повышении закупочной стоимости какао-бобов, как минимум, на 10%-15%. Это был грандиозный прорыв, и чтобы он случился, потребовалось 10-12 лет.
Это был грандиозный прорыв, и чтобы он случился, потребовалось 10-12 лет.
Будущее
Одна из опасностей, которая кроется во множестве подходов к организации социального предприятия, заключается в том, что возникает иллюзия конечности цели. Иллюзия возможности и близости достижения цели, после чего миссия компании будет исчерпана. Такое представление о социальном предприятии – глубоко ошибочно, потому что на самом деле социальный бизнес – это процесс. Так, Divine – это процесс, который когда-то начался и до сих пор не завершился. Он течет вместе со временем, со сменой поколений, с изменениями, которые переживают фермеры. Кооператив в Гане не состоялся бы, если в правильное время в правильном месте не оказались бы конкретные активисты, которые хотели повлиять на политику закупки какао-бобов у местных фермеров, хотели организовать их определенным образом. Сколько этот кооператив просуществует, продлится ли эта практика – зависит от множества факторов, в том числе от просвещения участников, их правильного понимания происходящего.
О России
Обоснован вопрос о возможности копирования опыта Divine в других отраслях экономики или других странах. В шоколадном бизнесе норма прибыли достаточно высокая, а стоимость сырья сравнительно низкая. Бэлфор считает, что копировать этот опыт в других секторах будет сложно.
Что же касается другой страны… Секрет успеха Divine лежал не столько в том факте, что предприятие поднималось на фоне общего экономического роста и прогрессивного движения, но в том, что отношения всех игроков строились на большом доверии и согласии. Речь идет об отношениях между частным сектором, государством и гражданским обществом. В России о таких отношениях говорить пока не приходится. Это — сфера политики, и быстрых результатов здесь ждать не стоит.
Мурат Тедеев: Борец должен быть сильным, ловким и даже немного безумным
Борьба — один из наиболее популярных и распространенных видов спорта в Южной Осетии. В Цхинвале более тридцати лет функционирует Республиканская детско-юношеская спортивная школа борьбы, в стенах которой были воспитаны десятки выдающихся спортсменов. О деятельности школы в интервью ИА «Рес» рассказал ее директор Мурат Тедеев.
О деятельности школы в интервью ИА «Рес» рассказал ее директор Мурат Тедеев.
— Республиканская детско-юношеская школа борьбы была создана в 1978 году. Раньше наша школа располагалась близ городского озера, затем в зданиях разных школ города. С 1997 года школа располагается в здании Цхинвальской школы борьбы имени Дзамболата Тедеева. Также мы с ребятами занимаемся в зале в микрорайоне «Московский». К сожалению, до сегодняшнего дня школа не располагает своим зданием. Это наша основная проблема. Если бы условия в школе были лучше, то и количество учеников, наверняка, прибавилось.
— Сколько ребят занимается в школе?
— По списку у нас тренируются 310 человек. Так как наша школа детско-юношеская, у нас занимаются дети с первого по 11 классы. Далее они уже переходят в Школу высшего спортивного мастерства. Прием учащихся у нас, как и в других школах, проводится в сентябре, но если у ребенка есть желание, мы его примем всегда.
В начале учебного года мы обходим школы и агитируем детей заниматься здоровым образом жизни, борьбой.
В школе функционируют три секции — это вольная борьба, самбо и дзюдо. Когда мы выезжаем на различные соревнования, наши ребята показывают очень хорошие результаты.
Учащиеся сначала проходят начальную подготовку первого года обучения, затем — второго. Далее идет третий этап — учебно-тренировочная группа первого и второго года обучения и, наконец, группа спортивного совершенствования.
— Проходят ли занятия в районах Республики?
— К сожалению, тренировки проходят только в Дзауском районе. В остальных районах у нас нет возможности организовывать тренировки из-за отсутствия залов. Мы пытаемся решить эту проблему, и как только в районах залы появятся, мы готовы начать тренировки. Тем не менее, ребята из сел приезжают тренироваться к нам в город.
— Какими качествами должен обладать борец?
— Чтобы одержать победу борец должен много трудиться над собой, тренироваться. Соответственно для него должны быть созданы хорошие условия для тренировок, должен быть хороший тренер рядом.
В целом, контактные виды спорта сложные. Здесь нужно проявлять характер. Человек может обладать всеми необходимыми физическими данными, но если у него не будет сильного характера, он не сможет добиться успехов. Бывает, что ребенок записывается к нам в школу, но спустя некоторое время уходит. Многим бывает сложно и они не справляются. Но многие возвращаются через определенный срок.
Борец должен быть сильным, ловким и даже немного безумным. В борьбе нужен талант от Бога и если талант есть, поработав над собой, можно добиться хороших результатов.
— Расскажите о планах школы на будущее.
— Хотелось бы, чтобы у наших спортсменов было больше возможностей выезжать за пределы Республики на различные соревнования, так как это дает большой стимул развиваться и больше работать над собой. В поездках нам оказывает помощь Комитет по молодежной политике, спорту и туризму Республики, родители спортсменов и другие. Спортивной формой нас обеспечивает Комитет, на всех конечно не хватает, но мы стараемся распределять ее среди наиболее активных учеников.
Мы уверены, что наши спортсмены очень талантливые, и надеемся, что в будущем они добьются больших успехов.
Первенство СШОР по дзюдо имени…
Первенство СШОР по дзюдо имени Анатолия Рахлина — 2021
Одно поколение сменяет другое. Множатся победы. Из года в год на татами выходят всё новые и новые дети. И вырастают люди — сильные и ловкие, а главное – думающие, воспитанные и порядочные – настоящие люди. Конечно, всё это заслуга замечательной команды тренеров школы, которая выступает единым фронтом на городских, российских и международных стартах. Но хоть мы и единое целое, но нас много, и мы разные, и в этом тоже наша сила. И потому прошедшее Первенство СШОР по дзюдо имени Анатолия Рахлина на призы «Клуба Дзюдо Турбостроитель» стало настоящей битвой тренеров, именно здесь можно было увидеть особенности работы каждого наставника.
На протяжении двух соревновательных дней тренеры не отходили от татами. Успеть сразу на трёх площадках помочь, подсказать, проконтролировать, а в младших возрастах ещё и утешить!
Участниками Первенства стали 404 воспитанника СШОР Рахлина четырех возрастных групп: 2004-06 г. р., 2007-08 г.р., 2009-10 г.р. и 2011-12 г.р. Из них 166 ребят вошли в число финалистов и получили замечательные подарки. Чествовали в этот день и их наставников. Благодарственные письма Комитета по физической культуре и спорту были вручены Валерии Черновой, Ивану Шеремету, Артуру Кушпите, Сергею Устяну и Александру Артемьеву. Поздравили тренеров президент «Клуба Дзюдо Турбостроитель» Михаил Рахлин, заместитель главы Администрации Калининского района Михаил Асташкевич и директор СШОР имени Анатолия Рахлина Павел Ефимычев.
р., 2007-08 г.р., 2009-10 г.р. и 2011-12 г.р. Из них 166 ребят вошли в число финалистов и получили замечательные подарки. Чествовали в этот день и их наставников. Благодарственные письма Комитета по физической культуре и спорту были вручены Валерии Черновой, Ивану Шеремету, Артуру Кушпите, Сергею Устяну и Александру Артемьеву. Поздравили тренеров президент «Клуба Дзюдо Турбостроитель» Михаил Рахлин, заместитель главы Администрации Калининского района Михаил Асташкевич и директор СШОР имени Анатолия Рахлина Павел Ефимычев.
Говорят тренеры СШОР по дзюдо имени Анатолия Рахлина
Татьяна Иванова: «Мы стали свидетелями интереснейшей конкуренции, разных видений моделей борца. В учениках каждого тренера отлично прослеживался общий стиль борьбы – почерк, присущий именно этому учителю. Все мы с удовлетворением увидели в учениках труд и знания, которые мы в них вложили. Работа идёт! Спасибо каждому тренеру – мы учимся друг у друга».
Иван Шеремет: «Я рад за тех, кто сегодня завоевал награды, но молодцы и те, кто хоть и не сумел подняться на пьедестал, но выложился на все 100. Чтобы двигаться вперёд нельзя только выигрывать. Победа и поражение должны идти рядом – одно вдохновляет, другое подстёгивает и даёт опыт».
Чтобы двигаться вперёд нельзя только выигрывать. Победа и поражение должны идти рядом – одно вдохновляет, другое подстёгивает и даёт опыт».
Артур Кушпита: «Независимо от результата видно, что у всех детей есть успехи. Мы проделали вместе большую работу, ребята отлично усвоили и применили информацию. Я горжусь каждым выступавшим ребёнком, чтобы я не говорил после схваток!»
Победители и призёры 2011-12 г.р.
26 кг
1.Апанасюк Кирилл
2.Антонов Максим
3.Корсаков Дмитрий
3.Лукьянов Никита
28 кг
1.Сидоренко Михаил
2.Гостев Мирослав
3.Авсюкевич Дмитрий
3.Накоряков Андрей
30 кг
1.Белов Радимир
2.Бочкарёв Максим
3.Авсюкевич Даня
3.Яминов Арсений
32 кг
1.Паршин Артём
2.Алирзаев Али
3.Мевлютов Саид
3.Паносяг Геворг
35 кг
1. Мисюрин Матвей
Мисюрин Матвей
2.Сырковский Олег
3.Катони Вадим
3.Назиров Идём
38 кг
1.Тавитов Сослан
2.Рахматуллин Фатих
3.Скоробогатов Леонид
3.Дудырев Егор
42 кг
1.Виноградов Яков
2.Черешов Роман
3.Кот Александр
3.Фролов Артем
46 кг
1.Золотков Дмитрий
2.Бернацкий Сергей
3.Воробьев Добромир
3.Жабко Григорий
+50 кг
1.Григорьев Алексей
2.Базин Егор
3.Кипа Кирилл
3.Степанов Никита
24 кг
1.Багметова Василиса
2.Казимова Амина
28 кг
1.Галкина Алёна
2.Колесникова Елизавета
3.Степанова Ульяна
3.Станева София
32 кг
1.Кадирова Марина
2.Бурцева Софья
3.Черкасова Вера
3.Бешлиу Ксения
34 кг
1. Магомедова Рашия
Магомедова Рашия
37 кг
1.Галимова София
40 кг
1.Балыбердина Снежана
2.Гореева Анна
3.Фокина Ева
Победители и призёры 2009-10 г.р.
32 кг
1.Чернов Макар
2.Лукьянов Яромир
3.Шатыгин Тимофей
3.Карпишин Николай
35 кг
1.Марценкевич Георгий
2.Смоляр Матвей
3.Михайлов Даня
3.Хусаинов Тимур
38 кг
1.Погодаев Александр
2.Озёрный Георгий
3.Павлов Владимир
3.Саркисов Тимур
42 кг
1.Никурадзе Георгий
2.Горохов Матвей
3.Рыжиков Артемий
4.Мещеряков Игорь
46 кг
1.Курбанов Ибрагим
2.Боциев Давид
3.Каландаров Максим
3.Иранов Марсель
50 кг
1.Бадалов Элвин
2.Саломатов Роман
3. Смирнов Матвей
Смирнов Матвей
3.Макаров Егор
55 кг
1.Джангиров Давид
2.Голубев Сергей
3.Федосцев Владимир
3.Орунбаев Бектур
60 кг
1.Виноградов Семён
2.Андони Артём
3.Керимов Артём
3.Рогожин Никита
31 кг
1.Гурина Ева
2.Гурина Ревекка
34 кг
1.Хестанова Тамирис
2.Щеголькова Богдана
3.Терентьева Екатерина
40 кг
1.Розанова Дарья
2.Кравченко Кристина
3.Терентьева Валерия
3.Сивцева Ника
44 кг
1.Коптилова Вера
2.Любимцева Ярослава
3.Маркова Владислава
48 кг
1.Керницкая Полина
2.Смирнова Екатерина
3.Чекулина Ксения
3.Пескорская Дана
+48 кг
1.Нацина Дарья
2.Шевцова Аделина
3.Реппонен Елизавета
3. Кравченко Арина
Кравченко Арина
Победители и призёры 2007-08 г.р. 38 кг
1.Романов Владимир
2.Губанов Антон
3.Галкин Алексей
3.Мусаткин Семён
42 кг
1.Юсупов Адам
2.Макеев Влад
3.Мугдинов Ислам
3.Теточкин Владимир
46 кг
1.Сидоренко Александр
2.Жолудев Дмитрий
3.Сомов Артур
3.Ибадуллаев Равиль
50 кг
1.Ситников Богдан
2.Алиев Адиль
3.Шмаков Юрий
3.Горячев Александр
55 кг
1.Минаков Егор
2.Медведев Илья
3.Гасымов Руслан
3.Салтанов Максим
60 кг
1.Новиков Лев
2.Лазарев Михаил
3.Семёнов Андрей
3.Кузин Никита
66 кг
1.Курбанов Омар
2.Хазалов Иван
3.Большов Дмитрий
3.Александров Никита
73 кг
1.%20df.%20Murad%20SULEYMANOV%20(AZE)%20-by%20VFA,%202%20-%202-3.jpg) Донов Артём
Донов Артём
2.Титков Михаил
3.Сухинин Михаил
3.Курдынко Яков
+73 кг
1.Киракосян Гайк
2.Дронов Илья
3.Королевский Мирон
57 кг
1.Гусейнова Джавгарат
2.Махнач Елизавета
+63 кг
1.Белявская Анастасия
2.Липчану Ангелина
Победители и призёры 2004-06 г.р.
46 кг
1.Гевондян Размик
50 кг
1.Стрижаков Даниил
2.Заболотский Владислав
3.Ширяев Дмитрий
55 кг
1.Гарданов Родион
2.Солаев Шерали
3.Шевяков Дмитрий
3.Голишников Никита
60 кг
1.Хадисов Ислам
2.Моренко Денис
3.Алешков Арсений
3.Иванов Дмитрий
66 кг
1.Киселев Павел
2.Чернов Тарас
3.Исаев Акаш
3.Шевчук Александр
73 кг
1. Глазков Даня
Глазков Даня
2.Смирнов Иван 3.Фотуйма Артем
3.Эстрин Кирилл
+81 кг
1.Шиенку Константин
2.Филимонов Тимур
3.Солаев Шухрат
3.Едемский Артемий
Фото: Ирина Гагарина
%d0%bb%d0%be%d0%b2%d0%ba%d0%b8%d0%b9 — с русского на все языки
Все языкиАбхазскийАдыгейскийАфрикаансАйнский языкАканАлтайскийАрагонскийАрабскийАстурийскийАймараАзербайджанскийБашкирскийБагобоБелорусскийБолгарскийТибетскийБурятскийКаталанскийЧеченскийШорскийЧерокиШайенскогоКриЧешскийКрымскотатарскийЦерковнославянский (Старославянский)ЧувашскийВаллийскийДатскийНемецкийДолганскийГреческийАнглийскийЭсперантоИспанскийЭстонскийБаскскийЭвенкийскийПерсидскийФинскийФарерскийФранцузскийИрландскийГэльскийГуараниКлингонскийЭльзасскийИвритХиндиХорватскийВерхнелужицкийГаитянскийВенгерскийАрмянскийИндонезийскийИнупиакИнгушскийИсландскийИтальянскийЯпонскийГрузинскийКарачаевскийЧеркесскийКазахскийКхмерскийКорейскийКумыкскийКурдскийКомиКиргизскийЛатинскийЛюксембургскийСефардскийЛингалаЛитовскийЛатышскийМаньчжурскийМикенскийМокшанскийМаориМарийскийМакедонскийКомиМонгольскийМалайскийМайяЭрзянскийНидерландскийНорвежскийНауатльОрокскийНогайскийОсетинскийОсманскийПенджабскийПалиПольскийПапьяментоДревнерусский языкПортугальскийКечуаКвеньяРумынский, МолдавскийАрумынскийРусскийСанскритСеверносаамскийЯкутскийСловацкийСловенскийАлбанскийСербскийШведскийСуахилиШумерскийСилезскийТофаларскийТаджикскийТайскийТуркменскийТагальскийТурецкийТатарскийТувинскийТвиУдмурдскийУйгурскийУкраинскийУрдуУрумскийУзбекскийВьетнамскийВепсскийВарайскийЮпийскийИдишЙорубаКитайский
Все языкиАнглийскийНемецкийНорвежскийКитайскийИвритФранцузскийУкраинскийИтальянскийПортугальскийВенгерскийТурецкийПольскийДатскийЛатинскийИспанскийСловенскийГреческийЛатышскийФинскийПерсидскийНидерландскийШведскийЯпонскийЭстонскийТаджикскийАрабскийКазахскийТатарскийЧеченскийКарачаевскийСловацкийБелорусскийЧешскийАрмянскийАзербайджанскийУзбекскийШорскийРусскийЭсперантоКрымскотатарскийСуахилиЛитовскийТайскийОсетинскийАдыгейскийЯкутскийАйнский языкЦерковнославянский (Старославянский)ИсландскийИндонезийскийАварскийМонгольскийИдишИнгушскийЭрзянскийКорейскийИжорскийМарийскийМокшанскийУдмурдскийВодскийВепсскийАлтайскийЧувашскийКумыкскийТуркменскийУйгурскийУрумскийЭвенкийскийБашкирскийБаскский
Ловкий контроль семи функциональных движений рук с помощью кортикальной чрескожной стимуляции мышц у человека с тетраплегией
Front Neurosci. 2018; 12: 208.
, 1, 2, 3 , 2, 3, 4 , 1 , 5 , 1 , 5 , 5 , 2, 4 , 2 , 1 и 1, *
Samuel C. Colachis, IV
1 Medical Devices and Neuromodulation Group, Battelle Memorial Institute, Columbus, OH, United Штаты
2 Неврологический институт, Государственный университет Огайо, Колумбус, Огайо, США
3 Департамент биомедицинской инженерии, Государственный университет Огайо, Колумбус, Огайо, США
Марси А.Бокбрейдер
2 Неврологический институт, Университет штата Огайо, Колумбус, Огайо, США
3 Департамент биомедицинской инженерии, Государственный университет Огайо, Колумбус, Огайо, США
4 Департамент физической медицины и реабилитации, Государственный университет Огайо, Колумбус, штат Огайо, США
Mingming Zhang
1 Medical Devices and Neuromodulation Group, Battelle Memorial Institute, Columbus, OH, United States
David A.Friedenberg
5 Advanced Analytics Group, Battelle Memorial Institute, Columbus, OH, United States
Nicholas V. Annetta
1 Medical Devices and Neuromodulation Group, Battelle Memorial Institute, Columbus, OH, United States
Michael А. Швеммер
5 Advanced Analytics Group, Battelle Memorial Institute, Колумбус, Огайо, США
Николас Д. Скомрок
5 Advanced Analytics Group, Battelle Memorial Institute, Колумбус, Огайо, США
Уолтер Дж.Mysiw
2 Неврологический институт, Государственный университет Огайо, Колумбус, Огайо, США
4 Кафедра физической медицины и реабилитации, Государственный университет Огайо, Колумбус, Огайо, США
Али Р. Резай
2 Неврологический институт, Государственный университет Огайо, Колумбус, Огайо, США
Герберт С. Бреслер
1 Группа медицинских приборов и нейромодуляции, Мемориальный институт Баттел, Колумбус, Огайо, США
Гаурав Шарма
1 Группа медицинских устройств и нейромодуляции, Battelle Memorial Institute, Колумбус, Огайо, США
1 Группа медицинских устройств и нейромодуляции, Battelle Memorial Institute, Колумбус, Огайо, США
2 Неврологический институт, Университет штата Огайо, Колумбус, Огайо, США
3 Департамент биомедицинской инженерии, Университет штата Огайо, Колумбус, Огайо, США
4 Кафедра физической медицины и реабилитации, Государственный университет Огайо, Колумбус, штат Огайо, США
5 Advanced Analytics Group, Мемориальный институт Баттель, Колумбус, Огайо, США
Отредактировал: Кристоф Гугер, Guger Technologies, Австрия
Рецензировал: An H.До, Калифорнийский университет, Ирвин, США; Дэвид Томас Банди, Исследовательский институт Медицинского центра Канзасского университета, США
Эта статья была отправлена в Neural Technology, раздел журнала Frontiers in Neuroscience
Поступила в редакцию 25 сентября 2017 г .; Принято 15 марта 2018 г.
Copyright © 2018 Colachis, Bockbrader, Zhang, Friedenberg, Annetta, Schwemmer, Skomrock, Mysiw, Rezai, Bresler and Sharma.
Это статья в открытом доступе, распространяемая в соответствии с условиями лицензии Creative Commons Attribution License (CC BY).Использование, распространение или воспроизведение на других форумах разрешено при условии указания автора (авторов) и правообладателя и ссылки на оригинальную публикацию в этом журнале в соответствии с принятой академической практикой. Запрещается использование, распространение или воспроизведение без соблюдения этих условий.
Эта статья цитируется в других статьях в PMC.
- Дополнительные материалы
Рисунок S1: Параметры FES и целевые группы мышц для каждого движения руки. (A) Репрезентативное изображение, показывающее пространственное отображение активных электродов на нижней и верхней манжетах FES, используемых для захвата банки . Красные и черные электроды обозначают электроды верхней и нижней стороны соответственно. (B) Активные электроды, амплитуда стимуляции и целевые группы мышц для каждого движения руки. L, нижняя манжета; U, верхняя манжета.
GUID: A4ACA196-4C39-4088-9D26-B399F4825E68
Рисунок S2: Среднее количество неудачных попыток на GRT с системой BCI-FES и без нее.У участника было меньше отказов при использовании системы BCI-FES. * Для передачи Can потребовалась активация двух движений руки — Hand Open и Can захват.
GUID: 51B44976-88AB-44E3-8CD1-F59E61A69D47
Фильм S1: Репрезентативное видео участника, манипулирующего объектами GRT во время обучения декодеру. Тестовые объекты были помещены перед участником, и маленькая виртуальная рука на мониторе перед ним подала ему команду начать и остановиться.
GUID: 092E6A49-F94B-4583-BDE9-6ADA4488B24C
Фильм S2: Репрезентативное видео участника, выполняющего ОТО для всех объектов с системой BCI-FES и без нее. Участник получил устную команду начать и остановить 30-секундное испытание GRT.
GUID: 71C36D41-0026-4A28-B173-019A66C81A19
Abstract
Люди с тетраплегией считают восстановление функции кисти критической неудовлетворенной потребностью в восстановлении своей независимости и улучшении качества жизни.Технология функциональной электрической стимуляции (FES), управляемая интерфейсом мозг-компьютер (BCI), решает эту проблему, повторно соединяя мозг с парализованными конечностями для восстановления функции. В этом исследовании мы количественно оценили эффективность интуитивно-контролируемой чрескожной системы FES при выполнении стандартизованных задач по манипуляции с объектами из теста Grasp and Release Test (GRT). Мы обнаружили, что человек с тетраплегией может использовать систему для управления до семи функциональных движений рук, каждое с индивидуальной точностью> 95%.Он смог выбрать одно движение из возможных семи доступных ему движений и использовать его, чтобы соответствующим образом манипулировать всеми объектами ОТО в реальном времени с помощью естественных захватов. С использованием системы участник не только улучшил свои показатели GRT по сравнению с его базовым уровнем, продемонстрировав увеличение количества передач для всех объектов, кроме Block , но также значительно улучшил время передачи для самых тяжелых объектов (видеокассета ( VHS). ), Банка ).Анализ нижележащих нейронных репрезентаций моторной коры, связанных с состояниями захвата руками, выявил перекрытие или неразрывность в паттернах нейронной активации для объектов схожей формы, которые влияли на производительность BCI-FES. Эти результаты предполагают, что нейронные представления моторной коры для функционального захвата, вероятно, больше связаны с формой руки и силой, необходимой для удержания объектов, а не с самими объектами. Эти результаты, демонстрирующие множественные натуралистические функциональные движения рук с BCI-FES, представляют собой следующий шаг к трансляции технологий BCI-FES из исследовательских устройств в клинические нейропротезы.
Ключевые слова: интерфейс мозг-компьютер, функциональная электрическая стимуляция, повреждение спинного мозга, нейроортоптика, функциональный захват руками
Введение
Приблизительно 130 000 человек во всем мире ежегодно страдают от травм спинного мозга (SCI). Почти половина этих случаев ТСМ находится на уровне C6 или выше, что приводит к значительному параличу, ухудшению качества жизни и потребности в самопомощи (ICCP, 2017). Более того, пациенты с шейным позвонком C6 или выше не обладают критической способностью хватать предметы, которые мешают им жить самостоятельно (Nas et al., 2015). Действительно, в нескольких исследованиях приоритетов пациентов с травмой спинного мозга последовательно сообщалось, что восстановление силы и ловкости верхних конечностей является наиболее желательной функцией для восстановления (Anderson, 2004; Snoek et al., 2004; Simpson et al., 2012; Collinger et al., 2013). ; Blabe et al., 2015). При опросе людей с тетраплегией после травмы спинного мозга более 75% указали, что нейропротезы с функциональной электрической стимуляцией (FES) для захвата рук были бы «очень полезны» для восстановления функции, которая положительно повлияла бы на качество жизни (Collinger et al., 2013). Тем не менее, системы FES, которые были продемонстрированы на сегодняшний день, либо ограничены обеспечением только нескольких функций руки, либо не обладают способностью активировать динамический моторный контроль для выполнения сложных функциональных задач, которые требуют синергетической интеграции парализованных и непарализованных мышц.
Усовершенствования в области мозгового компьютерного интерфейса (BCI) Технология FES, управляемая компьютерным интерфейсом, предлагает новый потенциальный способ переподключения мозга непосредственно к парализованной руке / руке, восстанавливая функциональное использование руки. Устройства FES с механизмами управления, отличными от BCI (например,g., миоэлектрические, глоток и вдыхание, айтрекеры), но они менее желательны из-за повышенной когнитивной нагрузки и неинтуитивного отображения между мыслью и действием (Ajiboye et al., 2017). Таким образом, подходы BCI предпочтительны из-за их способности обеспечивать более интуитивный и «высокоточный» управляющий сигнал, который может обеспечивать более сложные и клинически значимые функциональные движения конечностей (Chadwick et al., 2011; Ethier and Miller, 2015). Действительно, в недавних исследованиях большинство парализованных пациентов проявили интерес к использованию технологии BCI, которая может помочь восстановить утраченную функцию кисти / руки (Collinger et al., 2013; Blabe et al., 2015).
Несколько групп исследовали нейропротезы BCI-FES для восстановления функции захвата рук у парализованных людей с переменным успехом. Некоторые группы объединили электроэнцефалограмму (ЭЭГ) -BCI с системами FES и показали, что парализованные участники могли использовать системы для обеспечения до двух функциональных движений рук, воображая движение кисти / руки (Müller-Putz et al., 2005) или воображая неинтуитивное движение, такое как стопа (Pfurtscheller et al., 2003) или движение курсора (Lauer et al., 1999). Однако низкоразмерные управляющие сигналы ЭЭГ, а также неинтуитивное отображение мыслей и действий делают маловероятным, что эти ИМК могут обеспечить естественный непрерывный контроль над сложными функциями рук. Альтернативный подход, использующий сигналы на основе электрокортикографии (ЭКоГ), может обеспечить лучшее пространственное разрешение по сравнению с ЭЭГ и, следовательно, потенциальный механизм нейропротезного контроля, основанный на высококачественных нейронных сигналах. Действительно, парализованный участник, использующий чрескожную систему FES, контролируемую ECoG-BCI, успешно смог выполнить три движения (открытая рука, ладонь и боковой захват) (Márquez-Chin et al., 2009). Однако эта демонстрация была проведена в автономном режиме, где сигналы ЭКоГ, записанные от здорового участника, использовались для управления вызванными FES движениями парализованного участника. Таким образом, применимость ECoG-BCI для управления множественными движениями рук в режиме реального времени с помощью ортопедических аппаратов FES еще предстоит продемонстрировать. Чтобы преодолеть ограничения контроля ЭЭГ / ЭКоГ, исследователи имплантировали внутрикортикальные матрицы микроэлектродов (MEA), которые могут обеспечить более высокую скорость передачи информации (Баранаускас, 2014) и более точное обнаружение движений для декодирования и управления системами FES руки / руки.В предыдущем исследовании мы продемонстрировали доказательство концепции того, что человек с параличом уровня C5 может использовать MEA-BCI для управления чрескожной системой FES, чтобы обеспечить шесть независимых движений пальцев, запястий и рук (Bouton et al., 2016 Мы также продемонстрировали, что систему можно использовать для выполнения функциональной задачи «захват-выливание-перемешивание», предоставляя пользователю одновременное дифференцированное управление открытием руки, ладонным захватом и боковым захватом клавиш. Аналогичное исследование показало доказательство концепции того, что человек с параличом уровня C4 может использовать MEA-BCI для управления гибридным экзоскелетом и имплантированную систему FES, чтобы вызвать дотягивание верхней конечности, открытие руки и боковой захват ключа (Ajiboye et al., 2017). Участник этого исследования использовал эти движения для выполнения функциональных задач кормления. Однако ни одно предыдущее исследование не обеспечило тщательной количественной оценки и характеристики MEA-BCI, позволяющей контролировать двигательные функции верхней конечности с помощью FES, чтобы обеспечить воспроизводимость исследования и сравнение с другими нейропротезными устройствами.
В этом исследовании мы демонстрируем важный шаг на пути трансляции нейропротезирования BCI-FES от клиники к дому, демонстрируя, что пациент с тетраплегией может достичь произвольного контроля над семью функциями рук с помощью простого в обучении, коркового контроля, неинвазивный, ортопедический FES.Мы использовали MEA, имплантированный в моторную кору 26-летнего участника исследования с SCI уровня C5, для записи нейронных сигналов. Затем мы использовали алгоритмы машинного обучения, чтобы преобразовать нейронную активность в намеченные команды движения. Эти команды затем использовались для управления чрескожным ортопедическим аппаратом FES, обернутым на предплечье участника, который стимулировал соответствующие мышцы для вызова намеченного движения (рисунок). С помощью системы участник мог использовать обученный декодер, чтобы произвольно выбирать до семи различных функциональных состояний руки и использовать их для управления несколькими объектами различного размера, формы и веса.Функциональный прирост участников оценивался с помощью теста на захват и освобождение (GRT; Stroh-Wuolle et al., 1994), стандартизованного теста, разработанного для оценки нейропротезных свойств пациентов с травмой спинного мозга. Мы обнаружили более эффективный захват и перенос объектов с помощью BCI-FES по сравнению с исходным уровнем участника. Наши результаты также показали важную информацию о нейронном представлении различных движений рук. В частности, мы заметили, что надежное отображение множественных движений рук может формироваться под имплантированным MEA в очень небольшой области моторной коры.Мы обнаружили перекрытие между представлениями для объектов аналогичного размера и веса, и мы сообщаем о сильной корреляции между различимостью нейронных представлений движений руки и производительностью декодера.
Система BCI-FES и экспериментальная установка. Участник сидит на инвалидной коляске перед монитором, который показывает ему указанное движение руки. От участника требуется схватить и перенести объект на поднятую платформу. (1) Нервная активность регистрируется 96-канальным МЭА, имплантированным в моторную кору; (2) Вейвлет-разложение выполняется на необработанных данных для извлечения нейронной информации, относящейся к двигательному намерению; (3) шкалы вейвлетов с 3 по 6 используются для генерации нейронных функций на основе средней вейвлет-мощности (MWP); (4) алгоритмы машинного обучения декодируют активность MWP для каждой попытки движения руки; (5) Движение руки вызывается с помощью направленной чрескожной FES, доставляемой через манжеты, обернутые вокруг предплечья.
Материалы и методы
Дизайн исследования и участник исследования
Целью этого исследования было охарактеризовать уровень моторного контроля верхних конечностей, обеспечиваемый кортикально контролируемой системой FES у пациента с SCI. Вторичной целью было исследование нейронных репрезентаций, лежащих в основе захватов, используемых для различных объектов. Исследование было одобрено Управлением по санитарному надзору за качеством пищевых продуктов и медикаментов США (FDA) и Наблюдательным советом медицинского центра Векснера при Университете штата Огайо (Колумбус, Огайо) и зарегистрировано в клинических испытаниях.gov веб-сайт (Идентификатор {«тип»: «клиническое испытание», «attrs»: {«текст»: «NCT01997125», «term_id»: «NCT01997125»}} NCT01997125). Участник, упомянутый в этой работе, предоставил разрешение на фотографии и видео и заполнил процесс письменного информированного согласия до начала исследования. Участник — 26-летний мужчина со стабильным неспастическим тетрапарезом из-за шейной травмы спинного мозга, который он перенес в возрасте 19 лет. Его использование системы BCI-FES было впервые описано в Bouton et al. (2016). Международные стандарты неврологической классификации участника по неврологическому уровню SCI — C5 AIS A (моторный полный) с зоной частичной сохранности до C6.У него полный активный диапазон движений в плечах с обеих сторон, полное двустороннее сгибание локтя, подергивание запястья (недостаточное для тенодезного захвата) и отсутствие двигательной функции ниже уровня C6. Его сенсорный уровень — C5 справа (из-за измененного, но присутствующего легкого прикосновения к большому пальцу) и C6 слева. У него сохранена проприоцепция в правой верхней конечности в плече для внутреннего вращения посредством внешнего вращения, в локте для сгибания посредством разгибания, в предплечье для пронации посредством супинации и в запястье для сгибания посредством разгибания.Проприоцепция при сгибании правого пальца через разгибание в пястно-фаланговых суставах нарушена для всех пальцев.
Архитектура системы
Система состоит из трех основных компонентов: (i) Микроэлектродная матрица (MEA) штата Юта, имплантированная в область руки (идентифицированная с помощью предоперационных карт активации фМРТ) моторной коры левого полушария и нейропорта система сбора данных (Blackrock Microsystem Inc., США). На рисунке показано расположение имплантата в моторной коре, которое было подтверждено совместной регистрацией послеоперационной компьютерной томографии (КТ) с предоперационной фМРТ.Полную информацию о фМРТ и хирургических процедурах можно найти в Bouton et al. (2016), (ii) компьютер, на котором запущен алгоритм обработки данных и машинного обучения для декодирования предполагаемого движения пользователя на основе нейронной активности, и (iii) настраиваемая неинвазивная система FES высокой четкости со 130 электродами, используемыми для стимуляции руки / мышцы рук, чтобы вызвать желаемые движения рук. Стимулятор управлялся пользовательским кодом на основе MATLAB (версия 2014b, MathWorks Inc., США), работающим на ПК.
Местоположение MEA и качество сигнала с течением времени. (A) Красные области — это области мозга, активные во время воображаемых движений рук. Местоположение имплантированного MEA после операции КТ показано зеленым. (B) Данные MWP для всех каналов были собраны в течение периода 108 секунд в начале периодических тестовых сессий, когда участнику было предложено представить движения руки по сигналу. Характеристики MWP были рассчитаны для аппроксимации мощности в многочастотных диапазонах a, построенных как функция дней после имплантации. По данным MWP со временем наблюдалось снижение качества сигнала на 33%.
Сбор нейронных данных и обработка сигналов
96 каналов MEA регистрировали электрическую активность в коре с частотой дискретизации 30 кГц. Необработанные напряжения сначала фильтровались с использованием фильтра верхних частот первого порядка 0,3 Гц и аналогового аппаратного фильтра Баттерворта нижних частот третьего порядка 7,5 кГц. Вейвлет-разложение с использованием шкалы вейвлетов «db4» и 11 вейвлетов применялось к нейронным данным в интервале 100 мс (Маллат, 1998). Использовались вейвлет-шкалы 3–6, соответствующие мультиединичной активности (MUA) (234–3 750 Гц).Средние коэффициенты шкал 3–6 были стандартизированы для каждого канала, для каждой шкалы путем вычитания среднего и деления на стандартное отклонение этих шкал и каналов, соответственно. Затем четыре шкалы были объединены путем усреднения стандартизованных коэффициентов для каждого канала, что дало 96 значений, по одному для каждого канала MEA, на каждые 100 мс данных. Полученные значения впоследствии использовались как характеристики, называемые средней мощностью вейвлета (MWP), для ввода в декодеры реального времени. Артефакт стимуляции в данных был удален путем первого применения порога в 500 мкВ, который имел место одновременно по крайней мере на 4 из 12 случайно выбранных каналов.Затем было удалено окно данных 3,5 мс, охватывающее каждый обнаруженный артефакт стимуляции, и смежные сегменты данных были объединены. Чтобы посмотреть на качество сигнала MWP за исследуемый период, данные для всех каналов были собраны за период 108 секунд в начале периодических тестовых сессий, когда участнику предлагалось представить движения руки по сигналу. Характеристики MWP были рассчитаны для аппроксимации мощности в многочастотных диапазонах. Мы наблюдали снижение качества сигнала на 33% с течением времени (рисунок).
Пороговые значения пересечения (TC) были рассчитаны путем фильтрации необработанных записей напряжения через фильтр верхних частот 250 Гц с использованием отфильтрованных данных для определения среднеквадратичного (RMS) значения шума (определено Blackrock Microsystems, Inc. ), а затем применяют порог в -4,5 раза больше среднеквадратичного значения шума для записи напряжения. Данные не были отсортированы по пикам. Приблизительно 86 и 27 всплесков ОС можно было обнаружить на 87 и 1144 дни после имплантации, соответственно, в течение того же периода испытания 108 с, как описано выше.Корреляция между средним MWP и TC рассчитывалась в течение первых 55 секунд репрезентативного тренировочного блока. Средний MWP был рассчитан путем усреднения MWP по каналам. Глобальные TC были рассчитаны путем объединения TC для всех каналов в интервалы 100 мс.
Нейронное декодирование
Декодер нелинейной машины опорных векторов (SVM) (Humber et al., 2010) использовался для преобразования активности MWP в предполагаемые движения руки. Декодер был обучен блокам, состоящим из многократного повторения всех желаемых движений.Выходные классы были построены для каждого движения и имели оценки в диапазоне от -1 до 1. Соответствующая стимуляция активировалась, когда выходная оценка данного движения превышала пороговое значение, равное нулю. Если количество баллов на выходе декодера нескольких движений превышало пороговое значение, система включала стимуляцию движения с наивысшим баллом. Точность индивидуального движения рассчитывалась на основе заключительных тренировочных блоков как процент от временных точек 100 мс, в которых выходной сигнал декодера для данного движения правильно соответствовал ассоциированной реплике.Вероятность ответа для каждой реплики (представленной в виде матрицы путаницы) была рассчитана на основе заключительных обучающих блоков как процент активации для одного класса декодера движения из всех активных классов декодера движения внутри реплики. Индивидуальные оценки точности движений и вероятности ответа были усреднены по сессиям одного типа. Заключительные блоки каждой тренировки использовались для обучения декодеров. Это было сделано, чтобы свести к минимуму возможность мышечной усталости, связанной с повторяющимися FES одних и тех же движений в течение короткого периода времени, что потребовалось бы, если бы мы выполняли дополнительные тренировочные блоки для измерения точности декодера.
Стимуляция
Система FES состоит из многоканального стимулятора и гибкой манжеты со 130 электродами, которая наматывается на предплечье участника. Во время использования между электродами и кожей помещали гидрогелевые диски (Axelgaard, Fallbrook, CA), которые действовали как усилитель проводимости. Электроды имеют диаметр 12 мм и расположены с интервалом 22 мм по продольной оси предплечья и 15 мм в поперечном направлении. Управляемые током монофазные прямоугольные импульсы (частота импульсов 50 Гц и ширина импульса 500 мкс) использовались для обеспечения электрической стимуляции.Амплитуды импульсов варьировались от 0 до 20 мА и обновлялись каждые 100 мс. Калибровку стимулятора выполняли для каждого движения с использованием метода проб и ошибок, основанного на анатомии, для определения соответствующих пространственных структур электродов.
План эксперимента
Сеансы исследования с участником обычно проводились два или три раза в неделю, продолжительностью 3–4 часа. Данные, используемые для этого исследования, были собраны из восьми сеансов, а именно: исходные данные GRT на 702 и 703 дни после имплантации; Данные BCI-FES на 855, 857, 869 и 897 дни после имплантации; и воображаемые данные GRT на 1042 и 1043 дни после имплантации.Участник имел предыдущий опыт использования системы BCI-FES для других исследований, как сообщается в Bouton et al. (2016), Шарма и др. (2016) и Friedenberg et al. (2017). Сеансы начинались с калибровки модели стимуляции для каждого движения руки. Модели стимуляции и уровни интенсивности сохранялись в базе данных. В последующих сеансах с участником предыдущие калибровки вызывались и при необходимости уточнялись. Калиброванные движения включали: (i) боковую защелку клавиш указательным и большим пальцами для захвата стержня Peg , (ii) рукоятку штатива среднего и большого пальца для захвата Block , (iii) боковую клавишу среднего и большого пальца рукоятка для захвата пресс-папье , (iv) цилиндрическая силовая рукоятка безымянного и среднего пальцев для захвата выдавливаемой вилки , (v) рукоятка от кончика до кончика для захвата видеокассеты ( VHS ), (vi) ладонная Силовая рукоятка для захвата банки (индивидуальный деревянный цилиндр) и (vii) разгибание пальца и большого пальца ( Hand Open ) для раскрытия руки.Все объекты, использованные в этом исследовании, соответствовали спецификациям теста на захват и отпускание (Stroh-Wuolle et al., 1994).
Обучение нейронного декодера
Данные обучения для декодера были получены путем предложения участнику представить выполнение определенных движений руки с использованием анимированной виртуальной руки, отображаемой на мониторе компьютера. Во время действия сигнала обратная связь FES позволяла участнику схватить объект с указанием в стартовой зоне и перенести его на приподнятую платформу с помощью системы.В случае рукоятки вилки участник схватился за цилиндрическую рукоятку вилки и приложил давление вниз, чтобы сместить калиброванную пружину. Кроме того, во время подачи команды Hand Open участник раскрыл руку, вытянув пальцы. Каждый сигнал движения имел случайную продолжительность от 3 до 4 секунд и ограничивался сигналами отдыха со случайной длительностью от 4 до 5 секунд. Порядок сигналов движения был случайным, чтобы исключить ожидание сигналов.Каждый тренировочный блок включал по 3 реплики для каждого движения.
Тест схватывания и освобождения (GRT) с FES
Функциональный захват оценивался с помощью GRT (Stroh-Wuolle et al., 1994). Участнику предъявлялись случайные слуховые сигналы для различных объектов, и от него требовалось схватить объект в начальной зоне, поднять и перенести объект на возвышенную платформу, а также выпустить объект в целевой области как можно больше раз в 30-секундный тестовый период. Участнику был предоставлен период отдыха около 30 секунд между каждыми 30-секундными периодами тестирования.Падение объекта (или недостаточный рабочий объем цилиндра для вилки Fork ) засчитывался как отказ. Было записано количество успешных передач, неудачных передач и неполных передач, а также соответствующее время передачи для каждого объекта. Для вилки успешные «переходы» засчитывались, если подпружиненный поршень был достаточно смещен, что обозначено линией на поршне. Для передачи Can требовалось два класса декодера. Участник должен был выполнить Hand Open , чтобы расположить свою руку в оптимальном месте вокруг банки , а затем начать захват Can .Во время каждой реплики все классы декодеров движения (семь возможных) имели равный потенциал для преодоления порога и вызова стимуляции FES. GRT выполнялась 3 раза за сеанс для каждого объекта, при этом сообщалось среднее количество успешных, неудачных и неполных передач для каждого объекта и сеанса. Тестирование GRT проводилось в течение 4 сеансов (всего 12 испытаний) для Peg, Block, Paperweight, Fork и VHS. Данные Can были собраны за 3 сеанса (всего 9 испытаний). Тестовые сессии проводились на 855, 857, 869 и 897 дни после имплантации.
GRT без FES
Чтобы визуализировать нейронное представление движений рук в моторной коре, активность MWP была исследована во время движений с указанием указателя без какой-либо FES или обратной связи по движению. И движение, и стимуляция могут создавать артефакты, которые могут изменять MWP, несмотря на попытки их отфильтровать. Таким образом, FES был отключен во время тестовых блоков, чтобы удалить потенциальные искажающие эффекты артефактов из анализа. Было проведено три независимых блока испытаний для каждого объекта с использованием декодеров, созданных, как описано в разделе «Обучение нейронного декодера» в разделе «Методы», за исключением того, что обратная связь была предоставлена только с использованием анимированной руки, а не FES.Испытуемый был проинструктирован положить руку на объект, на который указывает указатель, а затем представить, как выполняет захват. Этот набор данных был собран за 2 последовательных сеанса (1042 дня, 1043 дня после имплантации). Пространственные шаблоны MWP сравнивались с использованием анализа главных компонентов (PCA), примененного к MWP на всех 96 каналах, когда правильные выходные сигналы декодера были выше порогового значения и в пределах правильной длительности сигнала. Основные компоненты 1 и 2 использовались для определения кластеризации. Каждый кластер был подогнан с помощью модели распределения гауссовой смеси для целей визуализации.Для каждого движения MWP усреднялся по всем блокам, когда соответствующий декодер был выше порога и в пределах правильной продолжительности сигнала. Среднее значение MWP на каждом канале было пространственно сопоставлено с физическим расположением MEA и отображено в виде тепловой карты. Наконец, для количественной оценки разделения между пространственными паттернами MWP были рассчитаны евклидовы расстояния между векторизованными пространственными паттернами каждого движения. Для этого анализа использовалась функция MATLAB Pairwise Distance (pdist). Евклидовы расстояния для каждого движения по сравнению со всеми другими были суммированы, чтобы определить степень разделения в нейронном представлении.
Статистический анализ
Парные сравнения между общим количеством передач и временем передачи объектов для GRT были выполнены с использованием парного теста t . Корреляция между сходством MWP и производительностью декодера оценивалась с использованием модели линейной регрессии. Корреляции между TC и MWP оценивались с использованием метода корреляции Пирсона. Все статистические анализы были выполнены с использованием MATLAB (версия 2014b), и P <0,05 считалось статистически значимым.Результаты представлены как среднее значение ± стандартное отклонение ( SD ).
Результаты
Кортикально управляемая система FES состояла из трех основных компонентов: (1) имплантированный 96-канальный MEA штата Юта для записи нейронных сигналов, (2) компьютер, выполняющий обработку данных, и алгоритм машинного обучения для декодирования предполагаемого движения пользователя. от нервной активности, и (3) неинвазивная манжета FES, намотанная на предплечье участника, чтобы стимулировать соответствующие мышцы, чтобы вызвать желаемое движение руки (рисунок).Вейвлет-разложение использовалось для обработки необработанных данных коры головного мозга в нейронные функции MWP (см. Раздел «Методы»). Эти функции использовались в качестве входных данных для алгоритма декодирования SVM, который переводил нейронную активность в предполагаемое движение пользователя, которое затем использовалось для управления электрической стимуляцией предплечья пользователя (рисунок). В течение всего исследования не наблюдалось никаких нежелательных явлений, связанных с устройством.
Выполнение функциональных движений руками с высокой точностью
Используя систему BCI-FES, субъект был обучен выполнять семь различных функциональных движений руками, которые были характерны для захвата, переноса и освобождения стандартизованных тестовых объектов.Объекты соответствуют спецификациям GRT (Stroh-Wuolle et al., 1994) и описаны на рисунке. Система FES была откалибрована для вызова семи дискретных динамических состояний руки, которые включали конкретный хват для каждого из шести объектов GRT и движение Hand Open (см. Схему захвата на рисунке и рисунок S1 для параметров стимуляции и целевых групп мышц предплечья для включение каждого движения руки).
Стандартизированные объекты GRT и функциональные захваты. Схема, показывающая различные объекты GRT с соответствующими размерами и весом.Схемы рук иллюстрируют захват / движение, разрешенное FES для объекта. Пальцы, которые были активированы и использовались для выполнения захватов / движений, выделены синим цветом. * Для объекта Fork требуется усилие 4,4 Н для прижатия цилиндра.
Во время тренировки участник получал визуальные подсказки для начала и завершения каждого движения руки, чередующиеся с периодами отдыха. На рисунках показан снимок нейронной активности, показывающий модуляцию MWP и соответствующий растровый график нейронной активности при пересечении порога (TC).Мы наблюдали сильную корреляцию между нейронной активностью TC и MWP (коэффициент корреляции = 0,65, p <0,001). Полный набор данных MWP использовался в качестве входных данных для обучения и генерации нейронного декодера. На рисунке показаны репрезентативные выходные данные декодера во время обучения, когда участник пытался движениями руки манипулировать объектами. Когда выходной сигнал декодера для определенного движения пересекает нулевой порог, система инициирует FES, чтобы вызвать соответствующее движение руки.Декодер был обучен 3-минутными блоками, и потребовалось 4-5 блоков обучения (12-15 минут общего времени обучения), чтобы создать надежный набор декодеров, который мог бы успешно классифицировать семь движений рук для захвата, передачи и освобождения различных объекты. Фильм S1 показывает, как участник манипулирует случайно выбранными объектами во время обучения. На рисунке изображена матрица неточностей, показывающая вероятность того, что декодер классифицирует каждое движение руки. Результаты показывают, что в целом предсказанное движение руки было правильно классифицировано как движение руки с указанием команды.Захваты для ручек Hand Open, Fork и Can всегда предсказывались правильно с вероятностью отклика 1. Однако декодеру было труднее различать ручки Peg, пресс-папье и Block (вероятности отклика = 0,94. , 0,91 и 0,90 соответственно). В целом, во всех испытаниях индивидуальная точность декодирования каждого движения варьировалась от 96,3 ± 0,7% (пресс-папье ) до 99,0 ± 0,5% ( Hand Open ), демонстрируя способность системы правильно классифицировать воображаемое движение из восьми возможных рук. состояний (семь движений руками и отдых) (таблица).
Обучение нейронному декодеру. Репрезентативные графики, показывающие (A) растровый график пересечения порога , (B) соответствующую активность MWP по всем каналам MEA, и (C) выход нейронного декодера , когда участник пытается выполнить семь движений руки по сигналу. Сплошные линии обозначают выходной сигнал нейронного декодера, а пунктирные линии обозначают время начала и окончания сигнала. Из семи возможных состояний движения руки, которые могут быть предсказаны декодером, для включения / выключения стимуляции использовался выходной балл того состояния, у которого наивысшая амплитуда больше нуля; (D) Матрица неточностей, показывающая вероятность ответа декодера для каждого сигнала движения.
Таблица 1
Точность индивидуального декодера.
| Ручное движение | Точность индивидуального декодера (%) | |||
|---|---|---|---|---|
| Ручное открывание | 99,0 ± 0,5 | |||
| Банка | 96.9 ± 0,9 | 9037 ± 1,2 | ||
| Колышек | 96,9 ± 0,6 | |||
| Вилка | 98,4 ± 0,8 | |||
| Пресс-папье | 96.3 ± 0,7 | |||
| VHS | 98,1 ± 0,2 |
Количественная оценка прироста функциональных показателей с помощью системы BCI-FES
Сертифицированный советом физиотерапевт проводил GRT (см. Раздел Методы) для исследования способности участника использовать систему BCI-FES для управления объектами различного размера, формы и веса. Помимо предоставления стандартизированных тестовых объектов, GRT также позволил нам сравнить производительность нашей системы с другими, которые использовали этот тест для исследования своих систем BCI-FES.На рисунке показаны репрезентативные снимки участника, передающего объект Can как часть GRT. Чтобы выполнить один перенос, участник использовал произвольные движения плечами, чтобы выровнять свою руку над банкой , инициировал движение Hand Open , чтобы развести пальцы и поместить банку в свою ладонь, затем инициировал и поддерживал ладонный захват, пока он перенес банку сбоку на приподнятую платформу и, наконец, прекратил хватку, чтобы освободить объект из руки.Фильм S2 показывает, как участник манипулирует объектами во время одного блока GRT.
Оценка функциональных характеристик с помощью теста «схватить и отпустить» (GRT). (A) Последовательные снимки участника, манипулирующего объектом Can как часть GRT. Участник начинает из состояния покоя, открывает свою руку и кладет ее на банку , берет банку , переносит ее на приподнятую платформу, а затем отпускает банку . Затем перед участником помещается новый объект, чтобы попытаться выполнить следующую передачу. (B) баллов GRT, показывающих среднее количество успешных переводов с системой BCI-FES и без нее. С использованием системы участник не только улучшил свои оценки GRT по сравнению с исходным уровнем, продемонстрировав увеличение количества перемещений для всех объектов, кроме блока , , но также смог захватить и перенести два объекта (пресс-папье , вилка ), которыми он не мог манипулировать на исходном уровне. (C) Среднее время передачи для каждого объекта с системой BCI-FES и без нее.При использовании системы скорость перемещения участника увеличилась для всех объектов, за исключением Peg и Block , которые он мог передавать быстрее самостоятельно с помощью адаптивных захватов. # Участник ни разу не смог передать эти объекты без системы. * Для переноса банки потребовалось два движения рук — открытая рука и захват банки . ** p <0,05 (парный t -тест).
На рисунке показаны возможности участника манипулировать объектами GRT с использованием и без использования системы BCI-FES. На исходном уровне (дни 702–703 после имплантации) и без системы BCI-FES участник не мог эффективно манипулировать (среднее количество успешных переносов <1) пресс-папье , банкой, VHS и вилкой . Тем не менее, он смог захватить и манипулировать Block и Peg , используя стратегии адаптивного захвата. С помощью системы BCI-FES (дни 855–897 после имплантации) участник не только смог вызвать правильное движение руки из возможных восьми доступных ему состояний, но также смог успешно захватить, перенести и освободить все объекты. и успешно нажмите вилку на вилку несколько раз в течение 30-секундного испытательного периода.В целом, с использованием системы количество успешных (неудачных) передач увеличилось (уменьшилось) по сравнению с базовым уровнем (см. Рисунок S2, показывающий общее количество неудачных попыток передачи с использованием системы и без нее). Блок Блок был исключением, где участник имел меньше успехов с системой BCI-FES, чем без него, поскольку участник мог использовать адаптивную хватку для передачи блока Блок самостоятельно. Помимо возможности быстрого переноса пресс-папье на (время переноса = 4.7 ± 1,2 с) и вытеснить вилку (время перемещения = 5,1 ± 1,1 с) с помощью системы BCI-FES, которую он в противном случае не смог бы сделать самостоятельно без системы, участник также показал значительное улучшение передачи раз с системой для двух других более тяжелых объектов, т. е. VHS и Can (рисунок). Однако для завершения передачи блока с системой BCI-FES участнику потребовалось значительно больше времени (6,4 ± 3,0 с на блок ), чем без (2.8 ± 1,0 с на Блок ), в то время как не было значительного изменения времени завершения для переноса Peg .
Исследование корреляции между нейронной различимостью и производительностью декодера
Когда участник выполнял ОТО, мы наблюдали несколько случаев неправильной классификации декодера. В частности, декодер иногда запускал захват пресс-папье , когда участник пытался освободить блок . Точно так же рукоятка VHS иногда использовалась во время выпуска Can .На рисунке показан типичный выходной график декодера для всего тестового блока GRT, который предоставляет примеры неправильной классификации декодера. Участник получил команду передать Блок , начиная с 170 с. В то время как захват блока Block был правильно задействован для каждой передачи, захват пресс-папье также неправильно активировался 4 из 5 раз после захвата блока Block (см. Фильм S2, в котором показаны передачи блока Block в течение этого испытательного периода. ).
Выводы нейронного декодера во время GRT. Типичные выходы декодера во время тестового блока GRT, показывающие случаи неправильной классификации декодера (черные треугольники). Все семь движений рук доступны участнику как часть декодера, и он должен вызвать правильное движение (сплошные линии) в течение 30-секундного испытательного периода (пунктирные линии), предоставленного ему для завершения ОТО для этого объекта. Для наглядности показаны только выходы декодера выше порога активации, равного нулю. Успешная передача банки требовала, чтобы участник вызвал два движения рук — Hand Open и Can захват (70–100 с).Во время передачи Can декодер имел две неправильные классификации (по одной для захвата PEG и VHS). Тем не менее, участник смог вызвать правильные движения руки, чтобы успешно выполнить две передачи Can в течение испытательного периода. Аналогично, во время передачи блока (170–200 с) участник четыре раза неправильно вызвал декодер для Пресс-папье . Однако это не повлияло на оценки GRT для блока , поскольку декодер для пресс-папье сработал после того, как участник завершил передачу блока .
Для дальнейшего исследования этих неправильных классификаций декодера мы проанализировали нейронную модуляцию, когда участнику было предложено представить семь движений руки с указанием без FES (см. Раздел Методы). За счет того, что система FES не использовалась, собранные нами данные нейронной модуляции не содержали стимуляции и / или каких-либо артефактов, вызванных движением. Мы применили PCA к нейронным данным MWP, чтобы качественно проиллюстрировать кластеризацию среди различных воображаемых движений рук (рисунок). Мы наблюдали перекрытия между кластерами MWP для пресс-папье и Block , а также VHS и Can .На рисунке показана тепловая карта среднего MWP для каждого воображаемого движения руки, наложенная на физическую схему 96-канального кортикального массива, показывающую пространственное распределение активности MWP между различными движениями руки. Чтобы измерить различимость нейронных представлений различных движений рук, мы вычислили евклидовы расстояния между пространственными распределениями MWP для всех движений рук (рисунок). Мы обнаружили, что нейронное представление воображаемых захватов Пресс-папье и Block , а также захватов VHS и Can было наиболее схожим и могло быть одним из факторов, вызывающих неправильную классификацию декодера, наблюдаемую во время функциональной задачи GRT. .При сравнении с результатами обучения нейронного декодера для задачи GRT мы также наблюдали сильную корреляцию ( R 2 = 0,74, p < 0,05 ) между оценками точности отдельных декодеров и различимостью нейронных представление движений рук (рисунок). Движение Hand Open имело наиболее отчетливое нейронное представление и наивысшую индивидуальную точность движения, в то время как захват Пресс-папье имел наименее разделенное нейронное представление и соответствующую самую низкую точность движения.
Нейронное представление функциональных движений рук в моторной коре. Участника попросили попытаться совершить движение руки с указанием команды. Во время этой задачи FES не предоставлялось, поэтому нейронные данные могут быть получены без каких-либо артефактов стимуляции. (A) Анализ главных компонентов (PCA) активности MWP показывает кластеризацию нейронной активности для каждого движения руки во время активации декодера для каждого функционального движения. Пунктирные линии показывают соответствие модели распределения гауссовой смеси. (B) Тепловые карты усредненной активности MWP во время активации нейронного декодера, наложенные на физическую схему электродной решетки для каждой попытки движения руки. Угловые (неактивные) электроды сравнения в электродной решетке помечены белыми квадратами. (C) Тепловая карта, показывающая попарные евклидовы расстояния между векторизованными пространственными паттернами MWP и подчеркивающая разделимость в нейронном представлении между различными движениями руки. Более темные цвета указывают на то, что нейронные представления похожи, а более светлые цвета указывают на несходство представлений. (D) Корреляция между точностью отдельного декодера и разделением в нейронном представлении (совокупное евклидово расстояние для каждого движения) показывает, что более высокая нейронная различимость приводит к более высокой точности декодера. Линия тренда указывает на линейную подгонку.
Обсуждение
Способность успешно управлять множеством реальных объектов, встречающихся во время повседневной деятельности, остается ключевой проблемой, ограничивающей практическую применимость устройств FES, контролируемых BCI, для людей, живущих с тетраплегией.В наших предыдущих исследованиях мы продемонстрировали доказательство концепции о том, что имплантированная технология BCI-чрескожной FES может обеспечить моторный контроль парализованной верхней конечности после SCI (Bouton et al., 2016). Мы сосредоточились на демонстрации возможности дифференциального контроля отдельных движений запястья, пальцев и рук, но не пытались количественно оценить или охарактеризовать поведенческие или нейронные особенности моторного контроля. В этом исследовании мы расширяем предварительные знания, применяя стандартизированные задачи, разработанные для нейропротезных исследований (манипуляции с объектами GRT) для оценки производительности системы.Таким образом, мы не только позволяем сравнивать нашу технологию BCI-FES с другими нейропротезами, но также развиваем новое понимание сильных сторон и ограничений системы BCI-FES. Мы показали, что участник нашего исследования может тренироваться использовать систему FES, управляемую BCI, для выполнения функциональных задач, которые требовали динамической интеграции парализованных мышц кисти / руки с включенной функцией FES с непарализованными мышцами плеча / локтя. Система позволила участнику выбрать желаемое движение руки из семи возможных тренированных движений, а также доступное ему состояние покоя, используя двигательное намерение.BCI-FES также позволил участнику манипулировать предметами разного размера, формы и веса с помощью умелых и мощных захватов. Кроме того, наше исследование позволило понять нейронную репрезентацию движений рук в моторной коре головного мозга. Мы показали, что стабильные репрезентации различных движений рук могут формироваться в очень небольшой области моторной коры под имплантированным МЭА. Кроме того, мы продемонстрировали, что различимость между этими нейронными представлениями может влиять на производительность декодера.
Поскольку тестируемые объекты сильно различались по размеру и форме, система FES была откалибрована для каждого объекта, чтобы вызвать уникальную форму / схему движения руки, которая обеспечивала силу и ловкость захвата, позволяя захватывать ладонный, боковой и кончик к кончику . Калибровка системы FES для каждого захвата включала точное нацеливание на отдельные группы мышц предплечья, чтобы вызвать определенные движения пальцев (см. Рисунок и рисунок S1, показывающие целевые группы мышц для каждого захвата). Использование MWP в качестве нейронных функций для декодирования обеспечило высокоточный пространственно-временной сигнал нейронной модуляции, который сильно коррелировал с нейрональной импульсной активностью и мог использоваться для различения различных движений руки в режиме реального времени без необходимости установления пороговых значений или явной сортировки спайков. (Фигура ).Во время обучения декодеру участник пытался вызвать правильное схватывание определенного объекта из семи доступных ему состояний движения (плюс отдых). Результаты обучения декодеру показывают, что участник смог использовать декодер для управления системой с высокой точностью — индивидуальные оценки точности для каждого движения были все> 96% (таблица) во время различных сеансов обучения нейронному декодеру в течение 4 дней. Несколько групп наблюдали, что состояния нейронов, связанные с различными воображаемыми движениями рук, могут быть четко представлены в человеческом мозге (Klaes et al., 2015; Bleichner et al., 2016; Leo et al., 2016). Наше открытие о том, что множественные движения рук могут быть надежно декодированы из моторной коры, является еще одним подтверждением этих наблюдений. Неизменно высокая точность декодеров при классификации отдельных захватов для рук не только указывает на надежность нейронных представлений в моторной коре, но также предполагает, что эта модуляция может быть надежно использована для точного управления нейроортетическим устройством FES, которое может восстановить несколько функции захвата рук.Результаты также подчеркивают, что для нашего обученного участника время обучения декодера для задачи манипулирования несколькими объектами было ограничено 12–15 мин. Эти результаты имеют значение, поскольку высокая точность и минимальное время обучения являются характеристиками, которые желательны для потенциальных пользователей нейропротезных устройств (Collinger et al., 2013).
Мы использовали стандартизированный GRT, чтобы продемонстрировать способность участника успешно использовать обученный декодер для управления несколькими объектами. Использование стандартизированной меры функциональных результатов не только помогло нам лучше оценить производительность нашей системы, но также предоставило стандартизированные отчетные показатели, которые могут облегчить объективное сравнение с другими аналогичными технологиями, помочь выявить области улучшений, повысить воспроизводимость исследований и помочь в принятие решений для врачей и потенциальных конечных пользователей.Результаты показывают, что с помощью системы BCI-FES участник смог вызвать правильное движение для манипулирования каждым из шести тестовых объектов с помощью натуралистических захватов (рисунок и фильм S2). Следует отметить, что участник может самостоятельно переносить некоторые объекты без использования системы BCI-FES (см. Фильм S2, правая панель, показывающая, как участник самостоятельно манипулирует объектами без FES). Например, участник использовал адаптивные стратегии (такие как супинация предплечья через бицепс с отведением / приведением плеча), чтобы легко схватить и освободить Peg и Block .Однако более тяжелые предметы, требующие более сильного захвата, было трудно перемещать без системы (рисунок). Используя систему BCI-FES, участник смог перенести более тяжелые предметы ( VHS, пресс-папье, банка, вилка ), а также продемонстрировал значительное улучшение времени передачи (рисунок).
Скорость передачи с использованием системы BCI-FES во время GRT выгодно отличается от скорости передачи, сообщаемой для других систем BCI-FES. Например, наш участник передал пресс-папье по ставке 4.7 ± 1,2 с на перенос по сравнению с ~ 36 с, которые потребовались участнику для переноса пресс-папье с использованием системы EEG-Freehand (Müller-Putz et al., 2005). Следует отметить, что неврологический уровень участника Muller-Putz et al. (C5 ASI A с остаточными движениями плеча и локтя) функционально аналогичен неврологическому уровню участника нашего исследования (C5 ASI A с остаточными движениями плеча и локтя). В то время как у участника нашего исследования было подергивание запястья в разгибании (уступая зоне частичного сохранения C6), он не смог вызвать тенодезный захват человека с неврологическим уровнем C6.Улучшенная производительность на GRT с нашей системой BCI-FES имеет большее значение по сравнению с системой EEG-Freehand, где участник имеет только один доступный захват, у нашего участника было семь функций рук, доступных ему, и он может добровольно выбрать ту, которая обеспечивает ему оптимальный захват целевого объекта. Скорость передачи с нашей системой также выгодно отличается от управляемой BCI роботизированной руки, используемой парализованными людьми — например, скорость передачи 6–10 передач в минуту для блока Block vs.0,1–1 передача в минуту для руки робота BCI, используемой для передачи блоков аналогичного размера во время теста Box and Block (BBT) (Wodlinger et al., 2015).
Анализ нейронной модуляции участника, когда он представлял различные движения рук, выявил интересные выводы о нейронных репрезентациях захватов руками в моторной коре головного мозга. PCA выявил перекрытия в кластерах MWP ручек для пресс-папье , блока — , блока и банки , — VHS (рисунок).Сходства в нейронном представлении для ручных захватов соответствовали пространственному распределению MWP на кортикальном массиве, где мы наблюдали группу каналов, которые, по-видимому, одинаково модулируются между этими захватами (рисунок). Анализ различий в модуляции MWP подтвердил, что нейронное представление воображаемых захватов Block и пресс-папье , а также захвата Can и VHS было действительно наиболее похожим из всех захватов (рисунок).Это согласуется с морфологией руки, наблюдаемой во время выполнения захватов: шаблоны захвата Block и пресс-папье представляют собой синергию боковых клавиш и прецизионных захватов от кончика до кончика, а шаблоны захвата Can и VHS представляют собой варианты захвата. ладонный силовой захват. Это сходство в нейронных представлениях для определенных захватов рук может быть одним из факторов, лежащих в основе неправильной классификации при декодировании, которую мы наблюдали во время тестовых блоков GRT.Другие группы сделали аналогичные наблюдения. Например, Leo et al. наблюдали кластеризацию нейронных репрезентаций, основанную на различиях в позе в форме рук (то есть точных и силовых захватах), что, в свою очередь, влияло на способность правильно классифицировать эти формы рук во время декодирования (Leo et al., 2016). Аналогичным образом Bleichner et al. использовали BCI на основе ЭКоГ для классификации четырех различных жестов рук и отметили, что жесты, которые коррелировали наиболее сильно в нейронном представлении, чаще всего классифицируются неправильно (Bleichner et al., 2016). Результаты не только расширяют общее количество движений рук, стабильное представление которых может наблюдаться в моторной коре, но также показывают, что можно изучать и декодировать нейронные представления в очень небольшой области под имплантированным MEA. Несмотря на это, наши выводы о том, что пространственные паттерны MWP перекрываются для некоторых движений рук, подчеркивают, что дополнительные нейронные функции (такие как распространение или фаза сигнала) и / или другие алгоритмы декодирования (например, алгоритмы глубокого обучения), возможно, потребуется изучить для расширения репертуар функций руки, которые можно надежно декодировать с помощью одного MEA.
Интересно, что нейронное представление для Hand Open в наших экспериментах было наиболее отличным от шести других захватов для рук (рисунок). Мы предполагаем, что это связано с тем, что поза Hand Open морфологически отличается от всех других захватов. Кроме того, шаблон FES для Hand Open в основном касался разгибателей запястья и кисти, в то время как шаблон FES для захватов часто включал и сгибающие, и разгибающие мышечные отсеки. Следовательно, обратная связь соматосенсорного рецептора и рецептора растяжения мышцы от стимуляции чувствительных областей могла распространяться на моторную кору и по-разному влиять на паттерны нейронной активации в Hand Open vs.понять состояния. Поэтому неудивительно, что во время обучения нейронному декодеру мы наблюдали самую высокую точность, когда участник пытался выполнить движение Hand Open (таблица). В целом, существует сильная корреляция между различимостью нейронного представления различных состояний руки и соответствующей точностью декодирования (рисунок). Следует отметить, что по сравнению с тестовыми блоками GRT, мы редко наблюдали эту неверную классификацию среди движений рук во время обучения декодеру. Это может быть связано с различиями в том, как выполняются блоки обучения и теста GRT.Во-первых, в отличие от тренировочных блоков, участник не получает визуальных подсказок для начала, поддержания и прекращения схватывания во время блоков теста GRT. Во-вторых, обучение декодеру более структурировано, а образ движения более последователен и осознан, поскольку участник должен схватить и передать объект, на который указывает указание, один раз в течение периода подсказки. Однако тестовый блок GRT может быть более сложным для участника, потому что он должен быстро и многократно активировать и деактивировать декодеры, чтобы передавать объекты столько раз, сколько он может в 30-секундном тестовом окне.Мы полагаем, что именно комбинация отсутствия усиливающих визуальных сигналов и быстрого переключения задач во время состояния GRT увеличивает вероятность ошибочной классификации декодера для схватывания с наиболее похожими нейронными представлениями.
Обеспечение возможностей захвата и манипуляции с использованием технологии BCI-FES является сложной задачей по сравнению, например, с задачей трехмерного достижения или индивидуального движения пальца / сустава, поскольку для этого требуются не только высокоточные управляющие сигналы и стратегии (Schaffelhofer et al., 2015), но также может потребоваться дополнительная сенсомоторная информация, связанная с формой целевого объекта, которая может потребоваться для правильного предварительного формирования руки (Leo et al., 2016). Кроме того, достижение задачи в космосе включает в себя координацию только трех степеней свободы (DOF), тогда как управление антропоморфной рукой требует управления 23 степенями свободы (Vargas-Irwin et al., 2010), что увеличивает сложность проблемы. Поэтому неудивительно, что имеется лишь несколько отчетов об успешной демонстрации захвата кистью с помощью BCI, большинство из которых ограничено количеством функциональных движений руки, которые можно было задействовать (Bouton et al., 2016; Шарма и др., 2016; Ajiboye et al., 2017; Friedenberg et al., 2017). Мало того, что количество функций руки, восстановленных нашим участником с тетраплегией для манипулирования объектами, значительно больше, чем было достигнуто любым предыдущим исследованием устройств FES, но мы также показываем, что это улучшение не произошло за счет точности, скорости или времени обучения. Наши результаты также имеют значение не только для реанимации при тетраплегии. Улучшенное понимание нейронного представления жестов рук в человеческом мозге и способность точно декодировать эти движения могут обеспечить новый управляющий сигнал для разработки других инструментов BCI; например, общение на языке жестов (Bleichner et al., 2016). Еще одно преимущество использования интуитивного BCI в сочетании с FES в реальном времени — это возможность способствовать синаптической нейропластичности в кортико-спинномозговом тракте (McGie et al., 2015) или способствовать нейропротезному «обучению» в моторной коре (Ganguly et al. , 2011).
Важно отметить, что это исследование ограничено одним участником, который имел более двух лет опыта использования BCI для вызова состояний кисти и предплечья до выполнения теста GRT. Начинающим пользователям BCI может потребоваться больше времени, чтобы достичь того же уровня ловкости рук для манипулирования объектами, как описано здесь.Кроме того, чрескожная манжета FES, используемая в этом исследовании, предназначена для стимуляции парализованных мышц предплечья для управления движениями кисти и запястья. Поэтому он лучше всего подходит для людей с уровнем тетрапареза C5 или ниже и у которых есть остаточные движения плеч и бицепсов. Еще предстоит изучить возможность использования манжеты FES для стимуляции плеча и трицепса или вспомогательного гравитационного устройства у пациентов с ТСМ с более высоким уровнем травмы. Наше устройство также было ограничено из-за отсутствия стимуляции тенара (основания большого пальца), что ограничивало качество захвата руками небольших предметов, требующих точного захвата (объекты этого типа не представлены в GRT).Необходимость ежедневного переобучения декодеров является еще одним ограничением существующей системы, которое необходимо будет преодолеть, чтобы сократить время настройки и облегчить перевод устройства для повседневного использования.
Таким образом, наше нейроортозное устройство BCI-FES значительно превосходит современное состояние вспомогательных устройств, способных удовлетворить желаемые приоритеты тетраплегического человека по восстановлению множественных, произвольных и естественных функций руки. Мы также демонстрируем, что наша система BCI-FES может обеспечивать функциональные, умелые захваты руками, которые могут создавать достаточную силу для манипулирования повседневными предметами с высокой точностью и практичной скоростью.Тот факт, что участник мог использовать систему для выполнения функциональных задач через ~ 900 дней после имплантации, еще раз подчеркивает трансляционный потенциал нашей системы. Будущие направления включают устранение системных ограничений, чтобы сделать следующее поколение BCI-FES устойчивым к повседневной изменчивости нейронных сигналов, портативным, пригодным для ношения, с большим количеством электродов и датчиков и менее навязчивым для дальнейшего облегчения клинического перевода.
Вклад авторов
GS разработал концепцию исследования; GS, HB, SC и MB разработали научные эксперименты; SC, MZ, GS и MB провели исследования; DF и MS разработали алгоритмы декодирования; NA внесла свой вклад в разработку аппаратного и программного обеспечения для стимуляции; AR выполнила операцию; SC, MZ, NS и GS проанализировали данные; WM и MB были вовлечены в набор участников; GS и SC написали рукопись.Все авторы внесли свой вклад в редактирование рукописи.
Заявление о конфликте интересов
Авторы заявляют, что исследование проводилось в отсутствие каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Благодарности
Мы благодарим участника исследования и его семью за их преданность делу и поддержку. Мы благодарим Адама Якобовица за помощь с клиническими сессиями, Патрика Ганзера за его полезные комментарии к рукописи, Элли Нам и Кристу Смит за их помощь со схемами.Мы благодарим Нила Остина за время, потраченное на изготовление стандартизированных тестовых объектов, используемых в исследовании.
Сноски
Финансирование. Финансовая поддержка для этого исследования была предоставлена Мемориальным институтом Баттелле и Центром нейромодуляции Университета штата Огайо.
Дополнительные материалы
Дополнительные материалы к этой статье можно найти в Интернете по адресу: https://www.frontiersin.org/articles/10.3389/fnins.2018.00208/full#supplementary-material
Рисунок S1
Параметры
FES и целевые группы мышц для каждого движения руки. (A) Репрезентативное изображение, показывающее пространственное отображение активных электродов на нижней и верхней манжетах FES, используемых для захвата банки . Красные и черные электроды обозначают электроды верхней и нижней стороны соответственно. (B) Активные электроды, амплитуда стимуляции и целевые группы мышц для каждого движения руки. L, нижняя манжета; U, верхняя манжета.
Рисунок S2
Среднее количество неудачных попыток на GRT с системой BCI-FES и без нее. У участника было меньше отказов при использовании системы BCI-FES. * Для передачи Can потребовалась активация двух движений руки — Hand Open и Can захват.
Movie S1
Репрезентативное видео участника, манипулирующего объектами GRT во время обучения декодеру. Тестовые объекты были помещены перед участником, и маленькая виртуальная рука на мониторе перед ним подала ему команду начать и остановиться.
Фильм S2
Репрезентативное видео участника, выполняющего ОТО для всех объектов с системой BCI-FES и без нее.Участник получил устную команду начать и остановить 30-секундное испытание GRT.
Ссылки
- Ajiboye A. B., Willett F. R., Young D. R., Memberg W. D., Murphy B. A., Miller J. P., et al. . (2017). Восстановление движений захвата и захвата с помощью стимуляции мышц, контролируемой мозгом, у человека с тетраплегией: демонстрация, подтверждающая правильность концепции. Ланцет
389, 1821–1830. 10.1016 / S0140-6736 (17) 30601-3 [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] - Андерсон К.Д. (2004). Ориентация на выздоровление: приоритеты населения с травмой спинного мозга. J. Нейротравма
21, 1371–1383. 10.1089 / neu.2004.21.1371 [PubMed] [CrossRef] [Google Scholar] - Баранаускас Г. (2014). Что ограничивает производительность современных инвазивных интерфейсов мозг-машина?
Фронт. Syst. Neurosci.
8:68. 10.3389 / fnsys.2014.00068 [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] - Блейб К. Х., Гилья В., Честек С. А., Шеной К. В., Андерсон К. Д., Хендерсон Дж. М. (2015). Оценка интерфейсов мозг-машина с точки зрения людей с параличом.J. Neural Eng.
12: 043002. 10.1088 / 1741-2560 / 12/4/043002 [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] - Блайхнер М. Г., Фройденбург З. В., Янсма Дж. М., Аарнуце Э. Дж., Ванстенсель М. Дж., Рэмси Н. Ф. (2016). Дайте мне знак: расшифровка четырех сложных жестов рук на основе ЭКоГ высокой плотности. Структура мозга. Функц.
221, 203–216. 10.1007 / s00429-014-0902-x [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] - Бутон К. Э., Шайхуни А., Аннетта Н. В., Бокбрейдер М. А., Friedenberg D. A., Nielson D. M. и др. . (2016). Восстановление коркового контроля функционального движения у человека с квадриплегией. Природа
533, 247–250. 10.1038 / nature17435 [PubMed] [CrossRef] [Google Scholar] - Чедвик Э. К., Блана Д., Симерал Дж. Д., Ламбрехт Дж., Ким С. П., Корнуэлл А. С. и др. . (2011). Непрерывный контроль нейронного ансамбля имитируемой руки человека с тетраплегией. J. Neural Eng.
8: 034003. 10.1088 / 1741-2560 / 8/3/034003 [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] - Collinger J.Л., Бонингер М. Л., Брунс Т. М., Керли К., Ван В., Вебер Д. Дж. (2013). Функциональные приоритеты, вспомогательные технологии и интерфейсы мозг-компьютер после травмы спинного мозга. J. Rehabil. Res. Dev.
50, 145–160. 10.1682 / JRRD.2011.11.0213 [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] - Этье К., Миллер Л. Э. (2015). Мышечная стимуляция, управляемая мозгом, для восстановления двигательной функции. Neurobiol. Дис.
83, 180–190. 10.1016 / j.nbd.2014.10.014 [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] - Friedenberg D., Швеммер М., Ландграф А., Аннетта Н., Бокбрейдер М., Бутон С. и др. . (2017). Контроль постепенного сокращения мышц руки у парализованного человека с помощью нейропротеза. Sci. Rep.
7: 8386. 10.1038 / s41598-017-08120-9 [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] - Гангули К., Димитров Д. Ф., Уоллис Дж. Д., Кармена Дж. М. (2011). Обратимая крупномасштабная модификация корковых сетей при нейропротезном контроле. Nat. Neurosci.
14, 662–667. 10.1038 / nn.2797 [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] - Humber C., Ито К., Бутон К. (2010). Негладкая формулировка машины опорных векторов для задачи нейронного декодирования. arXiv: 1012.0958. [Google Scholar]
- ICCP (2017). Международная кампания по лечению паралича травм спинного мозга.
- Клаес К., Келлис С., Афлало Т., Ли Б., Пейса К., Шанфилд К. и др. . (2015). Представления формы руки в задней теменной коре головного мозга человека. J. Neurosci.
35, 15466–15476. 10.1523 / JNEUROSCI.2747-15.2015 [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] - Lauer R.Т., Пекхэм П. Х., Килгор К. Л. (1999). ЭЭГ-контроль кистевого нейропротеза. Нейроотчет
10, 1767–1771. 10.1097 / 00001756-1990-00026 [PubMed] [CrossRef] [Google Scholar]
- Лео А., Ханджарас Г., Бьянки М., Марино Х., Габиччини М., Гуиди А. и др. . (2016). Ручное управление на основе синергии закодировано в моторных корковых областях человека. Элиф
5: e13420. 10.7554 / eLife.13420 [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] - Маллат С. (1998). Вейвлет-тур по обработке сигналов.Берлингтон, Массачусетс: Academic Press. [Google Scholar]
- Маркес-Чин К., Попович М. Р., Камерон Т., Лозано А. М., Чен Р. (2009). Управление нейропротезом для захвата с использованием автономной классификации электрокортикографических сигналов: тематическое исследование. Спинной мозг
47, 802–808. 10.1038 / sc.2009.41 [PubMed] [CrossRef] [Google Scholar] - Макги С. К., Зариффа Дж., Попович М. Р., Нагай М. К. (2015). Кратковременные нейропластические эффекты электрической стимуляции, контролируемой мозгом и мышцами.Нейромодуляция
18, 233–240. 10.1111 / ner.12185 [PubMed] [CrossRef] [Google Scholar] - Мюллер-Пуц Г. Р., Шерер Р., Пфурчеллер Г., Рупп Р. (2005). Контроль нейропротеза на основе ЭЭГ: шаг к клинической практике. Neurosci. Lett.
382, 169–174. 10.1016 / j.neulet.2005.03.021 [PubMed] [CrossRef] [Google Scholar] - Нас К., Язмалар Л., Сах В., Айдын А., Онес К. (2015). Реабилитация после травм спинного мозга. Мир J. Orthop.
6, 8–16. 10.5312 / wjo.v6.i1.8 [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] - Pfurtscheller G., Мюллер Г. Р., Пфурчеллер Дж., Гернер Х. Дж., Рупп Р. (2003). «Мысль» — управление функциональной электростимуляцией для восстановления захвата кисти у больного тетраплегией. Neurosci. Lett.
351, 33–36. 10.1016 / S0304-3940 (03) 00947-9 [PubMed] [CrossRef] [Google Scholar] - Шаффельхофер С., Агудело-Торо А., Шербергер Х. (2015). Расшифровка широкого диапазона конфигураций рук от моторной, премоторной и теменной коры макака. J. Neurosci.
35, 1068–1081. 10.1523 / JNEUROSCI.3594-14.2015 [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] - Sharma G., Friedenberg D. A., Annetta N., Glenn B., Bockbrader M., Majstorovic C., et al. . (2016). Использование искусственного нейронного обхода для восстановления коркового контроля ритмических движений у человека с квадриплегией. Sci. Rep.
6: 33807. 10.1038 / srep33807 [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] - Симпсон Л. А., Энг Дж. Дж., Сие Дж. Т., Вулф Д. Л. (2012). Здоровье и жизненные приоритеты людей с травмой спинного мозга: систематический обзор. J. Нейротравма
29, 1548–1555. 10.1089 / neu.2011.2226 [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] - Снук Г. Дж., Айзерман М. Дж., Херменс Х. Дж., Максвелл Д., Биринг-Соренсен Ф. (2004). Обследование потребностей пациентов с травмой спинного мозга: влияние и приоритет для улучшения функции рук у пациентов с тетраплегией. Спинной мозг
42, 526–532. 10.1038 / sj.sc.3101638 [PubMed] [CrossRef] [Google Scholar] - Стро-Вуолле К., Ван Дорен К. Л., Троп Г. Б., Кейт М. В., Пекхэм П. Х. (1994). Разработка количественного теста захвата и освобождения руки для пациентов с тетраплегией с использованием нейропротеза руки.J. Hand Surg.
19, 209–218. 10.1016 / 0363-5023 (94) -6 [PubMed] [CrossRef] [Google Scholar] - Варгас-Ирвин К. Э., Шахнарович Г., Ядоллахпур П., Мислоу Дж. М., Блэк М. Дж., Донохью Дж. П. (2010). Расшифровка действий полного охвата и схватывания местных популяций первичной моторной коры. J. Neurosci.
30, 9659–9669. 10.1523 / JNEUROSCI.5443-09.2010 [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] - Уодлингер Б., Дауни Дж. Э., Тайлер-Кабара Э. К., Шварц А. Б., Бонингер М.Л., Коллингер Дж. Л. (2015). Десятимерный антропоморфный контроль руки в интерфейсе мозг-машина человека: трудности, решения и ограничения. J. Neural Eng.
12: 016011. 10.1088 / 1741-2560 / 12/1/016011 [PubMed] [CrossRef] [Google Scholar]
Тонкая и крупная моторика у детей
Двигательные навыки — это навыки, которые позволяют нам совершать движения и выполнять повседневные задачи. Мелкая моторика — это навыки, требующие высокой степени контроля и точности работы мелких мышц руки (например, использование вилки).Крупные моторные навыки задействуют большие мышцы тела, чтобы обеспечить баланс, координацию, время реакции и физическую силу, чтобы мы могли выполнять более крупные движения, такие как ходьба и прыжки.
Двигательные навыки позволяют детям совершать движения, необходимые для выполнения повседневных задач, от питания до переезда с места на место. Как правило, определенные двигательные навыки у детей развиваются в определенном возрасте, но не каждый ребенок достигает определенных этапов в одно и то же время. У ребенка с двигательными нарушениями возникают проблемы с контролируемым, скоординированным и эффективным движением.Если кажется, что ваш ребенок отстает в развитии мелкой или крупной моторики, он, скорее всего, пройдет обследование, и ему может потребоваться физиотерапия или трудотерапия, чтобы наверстать упущенное.
Навыки мелкой моторики
Действия, связанные с мелкой моторикой, требуют ловкости рук и часто требуют координации движений рук и пальцев с глазами, что известно как зрительно-моторная координация.
Компоненты мелкой моторики включают способность захватывать предметы и манипулировать ими, использовать обе руки для выполнения задачи и использовать только большой палец и один палец, чтобы взять что-то, а не всю руку.
Ниже приведены лишь несколько примеров мелкой моторики, которые обычно возникают на разных этапах развития ребенка.
От рождения до 3 месяцев
- Использует оружие, чтобы размахивать или «бить» по объектам
- Наблюдает за движением стрелок и поднесением их ко рту
от 3 до 6 месяцев
- Начинает переносить предметы из рук в руки
- Руки вместе
- Досягаемость игрушек обеими руками
от 6 до 9 месяцев
- Начинает хвататься за предметы, например за бутылку
- Сжимает предметы
- Использует сгребающий захват для перемещения предметов пальцами
От 9 до 12 месяцев
- Начинает отдавать предпочтение одной руке другой
- Помещает мелкие предметы в чашку или контейнер
- Перелистывает страницы книги на несколько страниц за раз
- Развивает захват клешнями (хватание предметов указательным и большим пальцами)
- кормит себя фуршетом
от 12 до 18 месяцев
- Строит башню высотой в два блока
- Зачерпывает предметы ложкой или небольшой лопаткой
- Хлопает в ладоши
- Наброски мелками на бумаге
- Волны на прощание
от 18 месяцев до 2 лет
- Начинает держать карандаш кончиками пальцев
- Строит башню высотой от трех до четырех блоков
- Открывает неплотно завернутые пакеты или контейнеры
- Переворачивает страницы книги по одной странице за раз
- Ставит кольца на колышки
Возраст 2
- Укладывает блочную башню высотой в девять блоков
- Поворотные ручки двери
- Самостоятельно моет руки
- Застегивается и расстегивается большая молния
- Манипулирует глиной или пластилином
Возраст 3
- Складывает лист пополам
- Рисует круг после показа примера
- Застегивается на большие пуговицы
Возраст 4
- Самостоятельно одевается и раздевается
- Дотрагивается кончиками каждого пальца до большого пальца
- Правильно использует вилку
Возраст 5
- Вырезает круг
- Копирует форму треугольника
- Правильно берет карандаш
- Галстуки шнурки
Возраст 6
- Строит небольшую конструкцию из блоков
- Собирает вместе пазл из 16-20 частей
- Хорошо режет ножницами
- Режет пищу ножом
Вы можете поощрять ребенка развивать мелкую моторику, кладя его под игровой зал, используя погремушки для запястий или лодыжек или перемещая яркую игрушку, чтобы они могли ее визуально отслеживать.Для малышей занятия, которые могут улучшить мелкую моторику, включают поощрение брать предметы щипцами, строительство из кубиков и выполнение поделок. Вы также можете поощрять малышей и дошкольников играть с пластилином, губками, макаронами или водными игрушками.
Общий уровень моторных навыков
Крупная моторика — это движения, в которых задействованы большие группы мышц, которые, как правило, более широкие и энергичные, чем мелкая моторика. Эти движения включают ходьбу, удары ногами, прыжки и подъем по лестнице.Некоторые этапы развития крупной моторики также связаны с координацией глаз и рук, например, бросание или ловля мяча.
Ниже приведены некоторые примеры крупной моторики, которые обычно возникают на разных этапах развития ребенка.
от 3 до 6 месяцев
- Поднимает руки и ноги при размещении на животе
- Перевертывается
- Поддерживает собственную голову в положении сидя
От 6 месяцев до 12 месяцев
- Ползание
- Переходит из положения сидя в положение стоя
- Сидит без опоры
Возраст 1
- Забирается на низкую мебель
- Поднимается по лестнице с помощью
- Тянет или толкает игрушки колесами
- Прогулки с одной рукой
Возраст 2
- Прыгает одновременно двумя ногами
- Очень тугое движение на носках
- Подъем без перил
Возраст 3
- Ездит на трехколесном велосипеде с использованием педалей без помощи взрослого
- Бегает без падений
- Бросает мяч взрослому, стоящему на расстоянии 5 футов
Возраст 4
- Ловит мяч руками и телом
- Плавно работает с изменением скорости
- Поднимается по лестнице чередованием ног
Возраст 5
- Ловит мяч двумя руками
- Прыжки на одной ноге
- Выполняет прыжки и касания пальцами ног
- Поднимается и спускается по лестнице, неся предметы
Возраст 6
- Удар катящегося шара
- Прыгает через предметы высотой 10 дюймов
- Едет на велосипеде с обучающими колесами
- Броски с точным размещением
Поощряйте ребенка работать над крупной моторикой, проводя много времени на животе.Как только они овладеют этим, поощряйте их тянуться к игрушкам (а позже и ползти к ним), которые лежат перед ними. Чтобы побудить вашего ребенка ходить, помогите ему встать и сделать шаги, взяв его за руки. Поощряйте детей младшего и дошкольного возраста строить крепости, танцевать под песни типа «Голова, плечи, колени и пальцы ног», притворяться и таскать игрушки в повозках.
Задержка моторных навыков
Дети с неврологическими заболеваниями или задержками в развитии могут иметь проблемы с мелкой моторикой.Проблемы с мелкой моторикой часто не диагностируются до дошкольного возраста, когда становится более очевидным, что дети борются с различными школьными занятиями, такими как обучение копированию фигур или букв.
Некоторым детям будет поставлен диагноз дисграфия, различие в обучении, которое влияет на навыки письма, в то время как другим может быть поставлен диагноз расстройства координации развития (DCD или диспраксия), состояние, которое до сих пор широко не изучено. Детям с нарушениями мелкой моторики может потребоваться трудотерапия, модификации или вспомогательные технологии.
Может быть легче заметить, если ваш ребенок не достигает основных этапов развития моторных навыков, чем этапов мелкой моторики, потому что общие моторные навыки являются одними из самых ожидаемых; вы, вероятно, с нетерпением ожидаете, что ваш ребенок перевернется, ползет, приподнимется по мебели и сделает первые шаги. Когда ребенок растет, вы замечаете, когда он бегает и играет, и насколько хорошо он справляется с физическими играми и спортом.
Детям с неврологическими проблемами, задержками в развитии или инвалидностью обычно ставит диагноз их педиатр, если они постоянно пропускают важные вехи.Задержка общей моторики также может быть признаком диспраксии. Если задержка крупной моторики у детей влияет на движения, они могут получать физиотерапию, чтобы помочь с крупной моторикой, или им могут потребоваться модификации или вспомогательные технологии, чтобы не отставать от мобильности или легкой атлетики.
Слово от Verywell
Хотя каждый ребенок индивидуален, не стесняйтесь обсуждать любые проблемы, связанные с моторикой вашего ребенка, со своим педиатром. Если вашего ребенка направят на лечебную терапию или физиотерапию, вы будете вовлечены в терапию и получите инструкции о том, как работать с ребенком дома, чтобы развить его двигательные навыки.
Finger Games for Kids — The Inspired Treehouse
Эти забавные игры с пальцами — идеальный способ развить у детей младшего возраста различные мелкие моторики.
* Этот пост содержит партнерские ссылки. Читать далее.
Дети часто используют свои руки для развития всех видов навыков ребенка. Им нужно, чтобы их маленькие ручки и пальцы были сильными и скоординированными — от схватывания карандаша до ловли мяча.
В предыдущих публикациях мы писали о навыках манипулирования руками и предложили множество способов улучшить силу рук у детей.Мы даже показали одно из наших любимых занятий мелкой моторикой — гимнастику для пальцев!
Сегодня мы собираемся собрать несколько забавных и простых игр для пальцев, которые идеально подходят для тренировки ловкости, изоляции пальцев и многого другого!
1 || Горячие руки
В этой простой игре один ребенок вытягивает руки ладонями вверх. Противник кладет свои руки (ладонями вниз) поверх рук первого. Игрок, чьи руки находятся внизу, должен двигать обеими руками как можно быстрее, чтобы попытаться постучать тыльной стороной обеих рук своего противника, прежде чем она оттянет их.
2 || Пирожный торт
Еще одно любимое детство, пирожное, простое и веселое. Это видео-демонстрация идеальна!
3 || Камень ножницы для бумаги
Мы используем его, чтобы решить множество споров «кто идет первым» в нашем доме.
Камень — это кулак, бумага — это плоская рука, а ножницы — это указательный и средний пальцы, обозначенные буквой «V», чтобы выглядеть как ножницы!
Каждый игрок 3 раза ударяет кулаком по столу или по воздуху и по 3 раза каждый игрок представляет свой предмет (камень, ножницы или бумагу).Рок проигрывает бумаге. Бумага проигрывает ножницам. Ножницы проигрывают камню.
4 || Большой палец войны
Раз, два, три, четыре, объявляю войну большим пальцам! Сожмите кулак, соединитесь с партнером пальцами, а затем боритесь этими большими пальцами, пока кто-нибудь не коснется большого пальца на счет до 3! Хотите сделать вещи еще веселее? Посмотрите на эти временные татуировки на пальцах для борьбы на большом пальце или на это потрясающее кольцо для борьбы на большом пальце!
5 || Itsy Bitsy Spider (
)
Классика детства, эта игра отлично подходит для координации! Вот как играть:
Чтобы быть пауком, коснитесь кончиком указательного пальца одной руки кончиком большого пальца другой руки.Поочередно переходите из руки в руку указательным пальцем и большим пальцем, как паучок, при ходьбе, скручивая каждую руку, чтобы оказаться сверху.
Чтобы завершить все движения рук в песне, следуйте этому замечательному руководству, в котором есть демонстрации изображений.
6 || Bottom’s Up
Эта игра отлично подходит для группы из нескольких детей, в которую можно играть вместе. Один ребенок кладет руку на стол или другую поверхность.
Затем каждый из других детей кладет обе руки поверх рук первого человека, образуя большую стопку рук.Тот, кто находится внизу, должен быстро вытащить ее из-под стопки и положить наверх!
В этом действительно нет победителя, игра просто продолжается, когда дети вытаскивают нижнюю руку и складывают ее вверху стопки!
В качестве альтернативы, первый ребенок может расположить свою руку в положении «большой палец вверх», а следующий ребенок может схватить его за большой палец, оставив большой палец вверх. Все дети складывают руки в этой конфигурации «большой палец вверх», а затем человек, находящийся внизу, должен вытащить большой палец и схватить его за большой палец.
Если вам нравятся эти идеи, обязательно ознакомьтесь с этими классическими играми с хлопками в ладоши и другими потрясающими играми с руками для когнитивных и двигательных навыков!
Подпишитесь, чтобы получать нашу рассылку , обзор наших любимых сообщений и других замечательных находок со всего Интернета, которые будут доставлены прямо на ваш почтовый ящик!
Следующие две вкладки изменяют содержимое ниже.
Лорен Дробняк — соавтор блога The Inspired Treehouse и детский физиотерапевт, в настоящее время практикующий в образовательной среде.Она была физиотерапевтом 18 лет, 17 из которых — педиатром. Ее стремление изменить жизнь детей к лучшему привело ее предпринимательский дух в направлении создания возможностей для оздоровления и развития детей в игровой форме. Она занятая мама троих детей, которая любит хаос. Чтобы избавиться от стресса, Лорен любит заниматься спортом, как будто ей еще 20, йогой, шоколадом, хорошей книгой, просмотром Pinterest и всем остальным!
Последние сообщения от Lauren Drobnjak (посмотреть все)
Об Эрике — Эрик Вайхенмайер
Эрик Вайхенмайер
25 мая 2001 года Эрик Вайхенмайер стал первым слепым человеком, достигшим вершины горы.Эверест. В 2008 году он поднялся на пирамиду Карстенса на острове Папуа-Новая Гвинея, преодолев Семь вершин, самую высокую точку на всех континентах. Это достижение завершило кругозор в 13-летнем путешествии, которое началось с его восхождения на Денали в 1995 году. К нему присоединилась избранная группа из 150 альпинистов, совершивших этот подвиг.
Когда слух о выдающихся достижениях Эрика распространился, мир обратил на него внимание; Вскоре после восхождения на Эверест он был удостоен титула Time , в котором подробно рассказывалось о его покорении высочайшей вершины мира.С тех пор он написал несколько книг, в том числе свои мемуары Touch the Top of the World . Тем не менее для тех, кто давно знал его, его склонность принимать и преодолевать самые высокие испытания не стала неожиданностью.
Даже когда ретиношизис начал лишать его зрения к 14 годам, Эрик сопротивлялся мысли о том, что слепота унесет его на второй план жизни. Он зарекомендовал себя как грозный рестлер в старшей школе, представляя свой родной штат Коннектикут на Национальном чемпионате по вольной борьбе среди юниоров в Айове.В подростковом возрасте он также открыл для себя скалолазание и природную ловкость для тактильных аспектов сканирования скалы руками и ногами в поисках зацепок.
Окончив Бостонский колледж с двойным дипломом, Эрик стал учителем средней школы и тренером по борьбе в дневной школе Феникса. Тем не менее, это была самая высокая точка Северной Америки, гора, известная на коренном языке инуитов как Денали, где его поиски приключений начали обретать форму. Триумфы Эрика над некоторыми из самых грозных гор мира подпитывали растущее стремление извлечь уроки, которые он извлек в горах, чтобы помочь другим разрушить преграды в своей жизни.
Чтобы продвигать эту идею, Эрик стал соучредителем не просто организации, а движения под названием «Без барьеров». Миссия состоит в том, чтобы помочь людям с проблемами, всем нам, в какой-то степени, превратиться в бурю жизни, столкнуться с препятствиями лицом к лицу, проникнуться новаторским и новаторским духом и объединиться с великими людьми, чтобы жить с богатым смыслом и целью. . Девиз: «То, что внутри тебя, сильнее, чем то, что у тебя на пути». С этой целью Эрик продолжает бросать вызов себе, чтобы жить без преград, и в сентябре 2014 года он проехал на каяке все 277 миль по реке Колорадо через Гранд-Каньон.
Эрик — один из самых вдохновляющих, интересных и востребованных ораторов в мире. Его презентации увлекают и вдохновляют аудиторию, извлекая уроки из его жизни и приключений по всему миру. Основные послания Эрика сосредоточены на использовании силы невзгод, развитии руководящего видения и создании сильной «верёвочной команды». Эрик рассматривает каждую новую задачу как возможность решать проблемы, разрабатывать стратегию и открывать новые пути продвижения вперед.
«Я думаю, что это лучшее время в истории, самое драгоценное время в истории, чтобы быть пионером, протянуть руку, схватить невзгоды и проблемы, с которыми мы сталкиваемся, использовать энергию не только для преобразования нашей собственной жизни, но и для возвысить мир вокруг нас.”
— Эрик Вайхенмайер
В ходе новаторских приключений Эрика по всему миру он исследовал и определил, что значит жить жизнью без барьеров, описывая это как карту, которую мы строим для навигации и ведения важной жизни. Центральное место в этом путешествии занимает установка на то, чтобы постоянно ставить перед собой задачу расти и развиваться — по словам Эрика, «карабкаться», в то время как другие «разбивают лагерь».
Вдохновляющая карьера оратора провела Эрика по всему миру: от Гонконга до Швейцарии, от Таиланда до саммита АТЭС 2005 года в Чили.Эрик поделился платформой для выступлений с такими известными людьми, как:
- Джордж Буш
- Эл Гор
- Тони Блэр
- Колин Пауэлл
- Мадлен Олбрайт
- Генерал Норман Шварцкопф
- Кондолиза Райс
- Том Питерс
- Маркус Бэкингем
- Стивен Кови
Жизнь без преград
Слепой искатель приключений, поднявшийся на гору.Эверест и катание на байдарках по Гранд-Каньону, Эрик лучше других понимает, что препятствия реальны, а не просто воспринимаются, и что встречающиеся препятствия могут либо остановить нас, либо мы можем найти способ обуздать их и продвинуться в новые места, которые мы никогда не доберемся до другого пути. Эрик называет это «алхимией» — процесс превращения свинца в золото. «С алхимиком, — говорит он, — вы можете бросить их посреди жесткой конкурентной среды, лишить их ресурсов, поставить перед ними препятствия, и они все равно найдут способ победить — несмотря на невзгоды, но из-за этого.”
Эрик отправит аудиторию в путешествие, чтобы открыть для себя инструменты и идеи для развития того, что он называет «мышление без барьеров», — того, что нужно отдельным людям, командам и организациям, чтобы превратиться в шторм, превратить проблемы в величие и достичь для почти невозможных целей.
Уникальная история и мощное послание Эрика заинтересуют и вдохновят любую аудиторию. Чтобы узнать больше о том, как Эрик и сообщение «Без барьеров» могут помочь вашей компании, организации или команде с его новаторскими презентациями, перейдите в Книгу Эрика.
Прошлая аудитория Эрика:
Malva Travel to Mexico — Inicio
Lugar a visitar / Место для посещения
Motivo / Reason
Mensaje / Сообщение
Nombre / Имя *
Correo electrónico / электронная почта *
País / Country * País / CountryAnglish SauditaArgeliaArgentinaArmeniaAustraliaAustriaAzerbaiyánBahamasBangladésBarbadosBaréinBélgicaBeliceBenínBielorrusiaBirmaniaBoliviaBosnia у HerzegovinaBotsuanaBrasilBrunéiBulgariaBurkina FasoBurundiButánCabo VerdeCamboyaCamerúnCanadáCatarChadChileChinaChipreCiudad дель VaticanoColombiaComorasCorea дель NorteCorea дель SurCosta де MarfilCosta RicaCroaciaCubaDinamarcaDominicaEcuadorEgiptoEl SalvadorEmiratos Arabes UnidosEritreaEslovaquiaEsloveniaEspañaEstados UnidosEstoniaEtiopíaFilipinasFinlandiaFiyiFranciaGabónGambiaGeorgiaGhanaGranadaGreciaGuatemalaGuyanaGuineaGuinea ecuatorialGuinea-BisáuHaitíHondurasHungríaIndiaIndonesiaIrakIránIrlandaIslandiaIslas MarshallIslas SalomónIsr aelItaliaJamaicaJapónJordaniaKazajistánKeniaKirguistánKiribatiKuwaitLaosLesotoLetoniaLíbanoLiberiaLibiaLiechtensteinLituaniaLuxemburgoMadagascarMalasiaMalauiMaldivasMalíMaltaMarruecosMauricioMauritaniaMéxicoMicronesiaMoldaviaMónacoMongoliaMontenegroMozambiqueNamibiaNauruNepalNicaraguaNígerNigeriaNoruegaNueva ZelandaOmánPaíses BajosPakistánPalaosPanamáPapúa Nueva GuineaParaguayPerúPoloniaPortugalReino UnidoRepública CentroafricanaRepública ChecaRepública де MacedoniaRepública дель CongoRepública Democrática дель CongoRepública DominicanaRepública SudafricanaRuandaRumaníaRusiaSamoaSan Cristóbal у NievesSan MarinoSan Висенте у лас GranadinasSanta LucíaSanto Tomé у PríncipeSenegalSerbiaSeychellesSierra LeonaSingapurSiriaSomaliaSri LankaSuazilandiaSudánSudán дель SurSueciaSuizaSurinamTailandiaTanzaniaTayikistánTimor OrientalTogoTongaTrinidad у TobagoTúnezTurkmenistánTurquíaTuvaluUcraniaUgandaUruguayUzbekistánVanuatuVenezuelaVietnamYemenYibutiZambiaZimbabue
Estado / StateEstado / S tateAguascalientesBaja CaliforniaBaja Калифорния SurCampecheCiudad де MéxicoCoahuila де ZaragozaColimaChiapasChihuahuaDurangoGuanajuatoGuerreroHidalgoJaliscoMéxicoMichoacán де OcampoMorelosNayaritNuevo LeónOaxacaPueblaQuerétaroQuintana RooSan Луис PotosíSinaloaSonoraTabascoTamaulipasTlaxcalaVeracruzYucatánZacatecas ——————— AlabamaAlaskaArizonaArkansasCaliforniaCarolina дель NorteCarolina дель SurColoradoConnecticutDakota дель NorteDakota дель SurDelawareFloridaGeorgiaHawáiMoku’āina о Hawai’iIdahoIllinoisIndianaIowaKansasKentuckyLuisianaÉtat де ЛуизианаМэнМэрилендМассачусетсМичиганМиннесотаМисисипиМисуриМонтанаНебраскаНевадаНуэва-ДжерсиНуэва-ЙоркНуэва-ХэмпширНуэво-МехикоОхиоОклахомаОрегонПенсильванияРодемон-АйлендТеннесси3-ВирджинияТехас-де-Майорка2Вирджиния / Как вы узнали о Мальва Трэвел в Мексику?
Sumotori Dreams добавляет юмор к графической борьбе сумо в стиле тэгдолл
Борьба сумо насчитывает сотни лет и является почитаемой традицией в японской культуре.Цель состоит в том, чтобы вытолкнуть соперника за пределы ринга или заставить его коснуться земли чем-то другим, кроме ног. Он демонстрирует силу и ловкость борца против своего противника.
Sumotori Dreams берет все традиции и почитание из борьбы сумо. Остается довольно забавный симулятор тряпичной куклы, который заставит вас хихикать до конца дня…
Как и в реальном матче сумо, игроки начинают с того, что кладут руки на землю. Нажмите стрелку вниз, чтобы показать, что вы готовы.Когда оба игрока будут готовы, матч начнется. Цель — сбить противника с ног. Поскольку квадратные персонажи проворны, как пьяный мул, вам не понадобится много времени, чтобы сбить противника с ног или быть сбитым с ног самостоятельно.
Есть четыре стрелки движения: вперед, приседание, поворот влево и поворот вправо. Кроме того, есть две кнопки атаки, одноручное нажатие и двуручное нажатие. Однако элементы управления на самом деле не имеют большого значения, поскольку бойцы едва могут встать самостоятельно, если их не толкают.
Подобно играм, таким как Surgeon Simulator и Goat Simulator, эта игра никоим образом не предназначена для реалистичности. Вместо этого радость заключается в том, чтобы наблюдать, как блочные бойцы спотыкаются, изо всех сил пытаются ходить и пинают, как черепахи на спине, когда падают.
Даже после окончания матча вы можете наблюдать, как борцы жалко пытаются встать и поклониться друг другу. После игры выходки на самом деле более интересны, чем сам матч.
В игре есть три режима: один игрок против компьютерного оппонента, настольный стиль игрок против игрока и ИИ против ИИ, что на самом деле является моим любимым режимом.Я люблю смотреть, как борцы толкаются, падают и извиваются. Это почти слабительное, как если бы вы наблюдали, как плывут рыбы. Только вместо того, чтобы расслабиться, я начинаю хихикать.
Есть шесть разных карт, на каждой из которых есть забавное препятствие, с которого борцы могут упасть. Например, на вечеринке на кухне у бойцов даже нет возможности прикоснуться друг к другу, потому что они всегда спотыкаются об обеденный стол, который разбивается на сотни кусков в тот момент, когда один из них касается его. Веселье следует.
Версия этой игры для ПК уже имеет большое количество поклонников. Одна из наиболее востребованных функций в будущем обновлении — это возможность играть до четырех сумо на ринге одновременно. Надеюсь, разработчики работают над этой функцией, потому что я знаю, что могу часами наблюдать, как четверо этих парней спотыкаются.
Sumotori Dreams стоит $ 0,99, и стоит того, чтобы посмотреть, что происходит. Игра доступна на iPhone, iPad и iPod touch за 0 долларов.99. Загрузите его в App Store сегодня.
Вы поклонник Sumotori Dreams? Вы возьмете версию для iOS?
Тактильный телеробот дает роботам маневренность
Я познакомился с Джереми Фишелом, основателем Tangible Research, на выставке CES 2020. Tangible Research — одно из трех учреждений, участвующих в разработке гуманоидной системы захвата с тактильным управлением, которая называется Tactile Telerobot. Взяв у него интервью в его переполненной будке на этаже Eureka Park, он познакомил меня со своими коллегами из Shadow Robot Company, SynTouch и HaptX.
«Компания Shadow Robot Company предоставляет экспертные знания и продукты для ловких рук роботов, Tangible Research предоставляет экспертные знания в области тактильного восприятия и тактильных ощущений, а HaptX предоставляет экспертные знания и продукты для тактильных перчаток», — сказал Фишел. «Полная система также включает оборудование от SynTouch (биомиметические тактильные датчики) и Universal Robots (роботы-манипуляторы)». Он взволнованно назвал триумвират «Конвергентная робототехническая группа» (CRG).
Вместе с Ричем Уокером из Shadow, Фишел получил спонсорскую поддержку от All Nippon Airways (ANA Holdings) в качестве ступеньки к возможной посадке на Марс.По словам Кевина Кадзитани из подразделения Avatar компании ANA: «Мы только начинаем поверхностно оценивать то, что возможно с этими передовыми системами Avatar и с помощью телеробототехники в целом. Помимо спонсорства ANA Avatar XPRIZE стоимостью 10 миллионов долларов, мы обратились к трем компаниям-партнерам с просьбой найти решения, которые позволят нам разработать высокопроизводительную, интуитивно понятную универсальную руку Avatar. Мы верим, что эта технология будет иметь ключевое значение для помощи человечеству в соединении на огромных расстояниях ».
В недавнем пресс-релизе ANA далее хвасталось: «Дистанционное управление и система дистанционного присутствия будут включать первую роботизированную руку, которая успешно передает ощущения прикосновения.Инновационная технология была названа «Святым Граалем робототехники» за ее потенциал революционизировать отрасль, сделав предстоящие публичные испытания настоящей вехой для предприятий ANA в области робототехники ».
Технология
CRG уже отображает «беспрецедентную точность дистанционного управления» с роботизированными пальцами, печатающими на клавиатуре в 5000 милях от людей-операторов. Уокер предсказывает, что Telerobot в конечном итоге будет использоваться в самых опасных человеческих миссиях. «Наша дистанционно управляемая система может помочь преобразовать работу в опасных условиях, таких как снятие с эксплуатации ядерных установок, и мы уже ведем переговоры с ядерным истеблишментом Великобритании относительно применения этой передовой технологии.”
Кредит: Converge Robotics Group
Фишел признался, что самым сложным аспектом этого 15-месячного начинания является не технология, а управление всеми заинтересованными сторонами. «Без шуток, это займет больше времени, чем можно было бы ожидать. Инженеры между компаниями хорошо работают вместе, почти без проблем — у нас есть много блестящих людей, работающих над чертовски крутым проектом, который проверяет множество флажков, чтобы инженеры были довольны (и мне нравится считать себя в этой группе).Однако деловые отношения порой усложняются, поскольку у предприятий есть свои цели и потребности ».
Он продолжил описывать свои дипломатические способности. «Когда возникают конфликты, мы стараемся принять наши разногласия и сосредоточиться на том, какие общие цели объединяют нас. Это, безусловно, история о том, что сумма больше, чем частей, поэтому я думаю, что каждый партнер и соавтор осознают, что это нечто особенное, что стоит поддерживать ». Как и в любом стартапе, эти навыки межличностного общения неоценимы для запуска любого предприятия, особенно стартапа, возглавляемого мехатроникой.
Tactile Telerobot конкурирует с OpenAI Dactyl Hand
В ловкости тактильного телеробота, доступного для «клиентов с ранним доступом», может соперничать только OpenAI Dactyl Hand, поразившая мир робототехники в октябре прошлого года своей способностью решать кубик Рубика одной рукой. Демонстрация способствовала использованию искусственного интеллекта (ИИ) вместо механики для решения множества сложных проблем с помощью программного обеспечения.
Как объясняет Питер Уилндер из OpenAI: «Многие роботы могут очень быстро собирать кубики Рубика.Важное различие между тем, что они там делали, и тем, что мы делаем здесь, заключается в том, что эти роботы созданы специально. Очевидно, что вы не можете использовать того же робота или тот же подход для выполнения другой задачи. У команды робототехники в OpenAI совсем другие амбиции. Мы пытаемся построить робота общего назначения. Подобно тому, как люди и наши человеческие руки могут делать множество вещей, а не только конкретную задачу, мы пытаемся создать что-то гораздо более общее по своим масштабам ».
Ключом к умелым движениям Дактила являются его алгоритмы и обучающие данные, способствующие общей автономии.Уайлдер уточняет: «Чтобы обучить реального робота, чтобы делать что-нибудь сложное, вам понадобится многолетний опыт. Даже человеку требуется пара лет, а у людей есть миллионы лет эволюции, чтобы научиться управлять рукой ».
Tactile Telerobot объединяет три основных продукта: Shadow Robot Hands, датчики SynTouch BioTac и перчатки HaptX. | Предоставлено: Converge Robotics Group
Великие дебаты
Скорость выхода на рынок при решении реальных проблем является ключевым отличием подхода к тактильному телероботу.Вместо того, чтобы полагаться на глубокое обучение для решения конкретных задач на протяжении десятилетий, удаленное тактильное управление немедленно задействует человеческую маневренность с расстояния по всему миру.
«Очевидно, преимуществом является тактильная обратная связь и высокая маневренность системы, которые делают ее действительно простой и интуитивно понятной в использовании», — пояснил Фишел. «Хотя я бы не назвал это несправедливым преимуществом, мы уже много лет говорим, что прикосновение важно в робототехнике. Но это очевидный факт, что когда вы лишаете людей чувства осязания, их способность ловко манипулировать значительно снижается, поэтому очевидно, что роботы, которые не могут чувствовать, ничем не станут лучше.Мы исправили это с помощью нашего Tactile Telerobot, чтобы эта критически важная тактильная и тактильная информация возвращалась оператору ».
Он продолжал раскрывать их методологию. «Причина, по которой мы выбрали тактильный телеробот автономному подходу, заключается в том, что человеческий интеллект по-прежнему намного превосходит ИИ. Как справедливо отметила Джудея Перл, пионер в области ИИ, до тех пор, пока ИИ не научится правильно разбираться с причиной и следствием, это будет просто распознавание образов, которое может быть впечатляющим с точки зрения вычислений, но на самом деле это не так. умный в общем смысле.”
Когда я настаивал на том, чтобы Фишел высказал мнение об OpenAI как о конкуренте, он ответил: «OpenAI делает удивительные вещи, мы не рассматриваем их как конкурентов, а скорее как партнеров, особенно по мере того, как мы движемся к приложениям, в которых мы ищем частичные решения». или полная автономия и обучение посредством демонстрации ».
«Ведутся большие споры о том, является ли человеческая рука оптимальным конечным эффектором для всего в нашей среде, или же мы просто спроектировали все в нашей среде так, чтобы хорошо работать руками», — сказал Фишел.