Тяга горизонтальная тренажер: Вертикально-горизонтальная тяга — купить тренажер в Москве в магазине AXGYM
Тренажер вертикальная-горизонтальная тяга 2 в 1 Авенир Спорт AV212/80 с весом 100 кг в Омске
Тренажёр AV212/80 относится к группе грузоблочные тренажёры и категории профессиональных или коммерческих тренажёров. Использованные при изготовлении тренажёра технологии, материалы и комплектующие позволяют эксплуатировать его с полной нагрузкой до 12 часов в сутки.
Тренажёр является многофункциональным и предназначен для тренировки широчайшей и круглой мышц спины. Также во время тренировки нагрузку получают бицепсы, задние дельты, большие ромбовидные мышцы спины.
Особенности тренажёра AV212/80
Рукоятки, ремни и манжеты в комплект поставки не входят и приобретаются по желанию и необходимости отдельно! Каталог рукояток и др.
-
- Основой тренажёра Вертикальная-горизонтальная тяга 2 в 1 100 кг AV212/80 является рама, произведённая из стальной профильной прямоугольной трубы сечением 80х40х3 мм.
- К раме на фланце крепится скамья с сиденьем, опорными обрезиненными подставками для ступней спортсмена и блоком опорных полиуретановых валиков для коленей.

- Грузоблок тренажёра состоит из девятнадцати стальных провтуленных ПВХ-вставками пластин весом по 5 кг каждая, направляющих, штока и штыревого фиксатора.
- Изменение нагрузки на тренажёре происходит при помощи штыревого фиксатора.
- Нагрузка с грузоблока на рабочие рукоятки передаётся посредством стальных тросов толщиной 5 мм в ПВХ-оплётке (максимальная нагрузка 800 кг).
- Передаточные шкивы, по которым двигаются тросы, оборудованы скрытыми подшипниками качения.
- сиденье тренажёра выполнено из многослойной фанеры и пенополиуретана повышенной прочности.
- Сиденье и валики покрыты качественной искусственной кожей.
- Валики позволяют выполнять упражнения с весом более собственного веса спортсмена и имеют вертикальную регулировку под его рост.
- Благодаря своему весу и амортизирующим подпятникам тренажёр не требует крепления к полу.
- Все части тренажёра покрыты полимерным покрытием, за исключением контактных (трущихся) частей, покрытых хромом.
- Стандартный цвет покрытия черный.
- Стандартный цвет обивки чёрный.


Габариты изделия Д х Ш х В (мм): 1800 x 1100 x 2285
Трансп.габариты Д х Ш х В (мм): 600 x 700 x 2160
Вес изделия (кг): 200
Вес стека (кг): 100
Макс.вес пользователя (кг): 180
тренажер для спины
| Серия | Серия 80 |
| Назначение | для спины; для зала; узкоспециальный |
| Тренировка мышц | дельты; большие ромбовидные мышцы спины; мышца спины; круглая мышца спины; широчайшие мышцы спины; бицепс; задние дельты |
| Длина (мм) | 1800 |
| Ширина (мм) | 1100 |
| Высота (мм) | 2285 |
| Транспортные габариты Д х Ш х В (мм) | 600 x 700 x 2160 |
| Вес изделия (кг) | 200 |
| Вес стека (кг) | 100 |
Макс. вес пользователя (кг) вес пользователя (кг) | 180 |
MB Barbell MB 3.08 Горизонтальная тяга MB Barbell MB 3.08 за 84 005 р.
/
/
/
Описание
Тренажер MB Barbell «Горизонтальная тяга» ориентирован на профессиональные фитнес-клубы и тренажерные залы. Предназначен для тренировки широчайших, трапециевидных и выпрямляющих мышц спины. Вторичная нагрузка: двуглавая мышца плеча, задние дельты, разгибающие мышцы плеча и предплечья. Отличается повышенной прочностью за счет радиальных загибов конструкции.
Принцип работы тренажера: горизонтальная тяга к поясу.
Цвет рамы: черный, белый, серый (с доплатой). Цвет обивки: черная, темно-синяя, светло-синяя, зеленая, салатовая, серая, красная, желтая. Цвет кожуха: синий, черный.
| ПАРАМЕТРЫ: | ПОКАЗАТЕЛИ: |
|---|---|
| Уровень: | профессиональный |
| Габариты (ДхШхВ): | 2530х510х2300 мм |
| Общий вес: | 209 кг |
| Рама | 60х60х2 мм |
| Вес рамы: | 80 кг |
| Покрытие | порошковое |
| Грузоблок: | 129 кг (9 плит по 12 кг, 2 плиты по 6 кг, флейта с плитой — 9 кг) |
| Привод грузоблока: | полиамидная лента 20х2,6 мм с пределом прочности на разрыве 390 Н/мм2 |
| Макс. нагрузка на привод: | 1500 кг |
Функциональные характеристики:
- В качестве утяжелителя используется грузоблок, состоящий из стальных плит покрытых ПВХ, что делает работу на тренажере бесшумной.
- Передача усилия осуществляется посредством всего 2-х роликовых блоков, что упрощает конструкцию и повышает надежность механизма.
- Тренажер укомплектован ручкой для тяги.
- Регулировка нагрузки происходит переставлением регулировочного штыря (фиксатора) закреплённого на эластичном шнуре.
- На флейту и направляющие нанесено комплексное гальваническое покрытие из никеля и хрома.
- Сиденье с болтовым креплением изготовлено из пятислойной фанеры толщиной 18 мм. В качестве наполнителя и обивки используется пенополиуретан и искусственная кожа.
- Установленные на все узлы вращения шариковые подшипники, обеспечивают надежное и комфортное использование тренажера.
- Ступени изготовлены из пятислойной фанеры толщиной 18 мм и пенополиуретана.
- Для хранения ручки установлена площадка с резиновыми накладками.
- Защита грузоблока выполнена из ударопрочного полистирола.
- Для устранения скольжения изделие оснащено подпятниками из ПВХ.


С этим товаром покупают
Сгибание – разгибание ног сидя МВ Barbell MB 3.01
121 940 р.
быстрый заказ
Сгибание – разгибание ног сидя MB Barbell MB 3.01 N
126 340 р.
быстрый заказ
Вертикально-горизонтальная тяга MB Барбел МВ 3.02
117 560 р.
быстрый заказ
Все товары в разделе Блочные тренажеры
Моделирование полета • ThrustCurve
Важно смоделировать полет вашей ракеты перед полетом по нескольким причинам:
- Безопасность
Очень важно выбрать двигатель, который является достаточно мощным
для стабильного полета вашей ракеты. - Законность
У каждого летного сайта есть ограничения по высоте, на которую вы можете летать и
Моделирование даст вам представление о том, как высоко взлетит ваша ракета. - Восстановление
Моделирование подскажет оптимальное время задержки срабатывания
система восстановления.
Этот сайт предоставляет файлы данных для использования с различными авиасимуляторами.
На этой странице описание моделирования в целом.
Смотрите страницу симуляторов
для списка существующих программ симулятора.
Также на этом сайте есть простой симулятор полета на ракете.
руководство по мотору.
См. также
статья по физике полета
для получения более подробной информации об этих силах и используемых расчетах.
Военно-воздушные силы
На высоту полета ракеты влияют три основные силы:
Тяга — это сила, создаваемая ракетным двигателем, и именно она поднимает ракету.
землю и заставляет ее двигаться вверх.
Разные двигатели создают тягу с разным профилем
и когда тяга отображается в виде графика с течением времени, создается «кривая тяги» двигателя.
Гравитация — это сила притяжения между ракетой и Землей.
Для наших целей мы рассматриваем это как постоянное ускорение
9,8 м/с 2 на ракете.
Это основная сила, которую должен преодолеть ракетный двигатель, чтобы взлететь.
Сопротивление — это трение ракеты, движущейся по воздуху, которое замедляет ракету.
(Обратите внимание, что это фактически влияет на ракету как при подъеме, так и при падении.)
Сопротивление пропорционально квадрату скорости, что означает, что оно увеличивается
очень быстро с увеличением скорости.
Еще одной силой, влияющей на полет ракеты, является ветер.
Однако это обычно не учитывается при моделировании, и ракеты
летал только при слабом ветре.
На приведенном выше графике вы можете увидеть грубую иллюстрацию того, как силы действуют на
ракета в полете.
Тяга просто следует кривой тяги двигателя.
Гравитация — это (относительно) постоянная сила.
Сопротивление резко возрастает с увеличением скорости
(пропорционально квадрату скорости).
Сопротивление максимально близко к концу работы двигателя.
(когда приложена вся тяга и достигнута максимальная скорость).
Фазы полета
Полет ракеты делится на несколько этапов:
- Старт Момент начала подъема ракеты.
- Полет с двигателем Время, в течение которого ракета разгоняется двигателем.
- Выгорание Окончание выгорания двигателя.
- Выбег Время после выгорания двигателя,
в то время как импульс все еще заставляет ракету подниматься. - Апогей Точка максимальной высоты (и нулевой скорости),
где ракета перестает подниматься и начинает опускаться. - Спуск Остаток полета до момента, когда ракета коснется земли.

Во время полета двигатель обеспечивает тягу, и ракета ускоряется вверх.
Из-за этого скорость и сопротивление увеличиваются.
Тяга, прилагаемая двигателем, изменяется от момента к моменту в соответствии с его характеристикой.
схема горения (на графике представлена кривой тяги).
Ближе к концу силового боя,
ракеты для хобби достигают максимального Q,
где обычно возникают «клочья».
Во время движения по инерции импульс ракеты все еще несет ее вверх,
но так как двигатель больше не обеспечивает тягу
скорость уменьшается из-за гравитации и сопротивления.
Точка апогея имеет решающее значение во всех симуляциях, поскольку она обеспечивает максимальное
высота, достигнутая ракетой.
Время от выгорания до апогея также важно для выбора времени задержки.
при использовании моторного катапультирования, так как должна срабатывать система спасения
когда ракета движется медленно.
Поскольку большая часть моделирования полета связана с достигнутой высотой,
фаза спуска (или восстановления) обычно представляет меньший интерес.
Моделирование, выполняемое моторным гидом
остановиться в апогее.
Анализ моделирования
Приведенные ниже графики взяты из моделирования, выполненного с помощью простой летящей ракеты.
на AeroTech M1939 (один из любимых моторов автора).
Нажмите на кнопки под графиком, чтобы увидеть, как различные силы и
измерения меняются во время полета.
тяга
ускорение
тащить
скорость
высота
Тяга – это сила, создаваемая двигателем.
Построение графика во времени дает «кривую тяги» двигателя.
Это не включает никаких других факторов и исходит из фактического статического испытания двигателя.
Эти файлы, специфичные для каждого двигателя, и являются целью этого сайта.
Ускорение есть сумма всех сил, действующих на ракету.
Тяга толкает ракету вверх во время горения,
гравитация тянет его вниз на протяжении всего полета,
и сопротивление замедляет его скорость.
Обратите внимание, что на этих графиках отрицательные значения обрезаются на нуле.
Это создает впечатление, что ускорение достигает нуля и остается на этом уровне.
На самом деле ускорение становится отрицательным, когда ракета начинает замедляться.
Сопротивление рассчитывается по скорости ракеты, так как оно пропорционально
к квадрату скорости.
Обратите внимание, насколько похожи кривые сопротивления и скорости.
за исключением того, что кривая сопротивления более крутая из-за функции квадрата.
Скорость – это скорость, с которой движется ракета.
Это определяется в любой момент
принимая скорость в предыдущей точке
и применение ускорения в текущей точке.
(Для ракет, которые остаются в нижних слоях атмосферы, max Q достигается при максимальной скорости.)
Высота — это высота над землей, на которой находится ракета.
Это определяется в любой момент
взятие высоты в предыдущей точке
и применение скорости в текущей точке.
Апогей достигается, когда скорость равна нулю,
который определяет наивысшую точку, достигнутую ракетой.
Обратите внимание, что мы прекращаем моделирование в апогее;
в противном случае высота снова упадет до нуля на этапе снижения.
Для математически мыслящих ускорение есть сумма статических и динамических сил,
скорость есть интегрирование ускорения,
а высота есть интегрирование скорости.
Для получения дополнительной информации о характеристиках двигателя см.
см. страницу статистики двигателя.
Список существующих программ-симуляторов см.
см. страницу симуляторов.
Чтобы найти двигатели для вашей ракеты,
попробуй моторчик.
Патент США на симулятор управления тягой типа Sidestick Патент (Патент № 4,907,970, выданный 13 марта 1990 г.)
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к оборудованию для имитации летательных аппаратов и, в частности, к устройству бокового рычага для имитации управления тягой.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
При обучении пилотов пилотированию опытных самолетов или существующих самолетов, с которыми пилот знакомится, обычно используют тренажеры. Симуляторы также используются при оценке конструкции кабин для новых или предлагаемых самолетов. Это приложение требует большой гибкости в оборудовании для моделирования, поскольку это моделирование может первоначально происходить в простом деревянном макете кабины, а затем переходить к более сложному оборудованию, такому как тренажеры подвижной базы и центрифуги. Эти устройства имитируют фактические органы управления, которые пилот будет использовать во время полета, и должны имитировать ощущения, с которыми пилот столкнется во время фактического использования рабочего оборудования.
Управление тягой современных высокопроизводительных реактивных самолетов обычно осуществляется с помощью рычагов управления вперед-назад. В высокопроизводительных военных самолетах рычаги управления тягой также используются для запуска форсажных камер.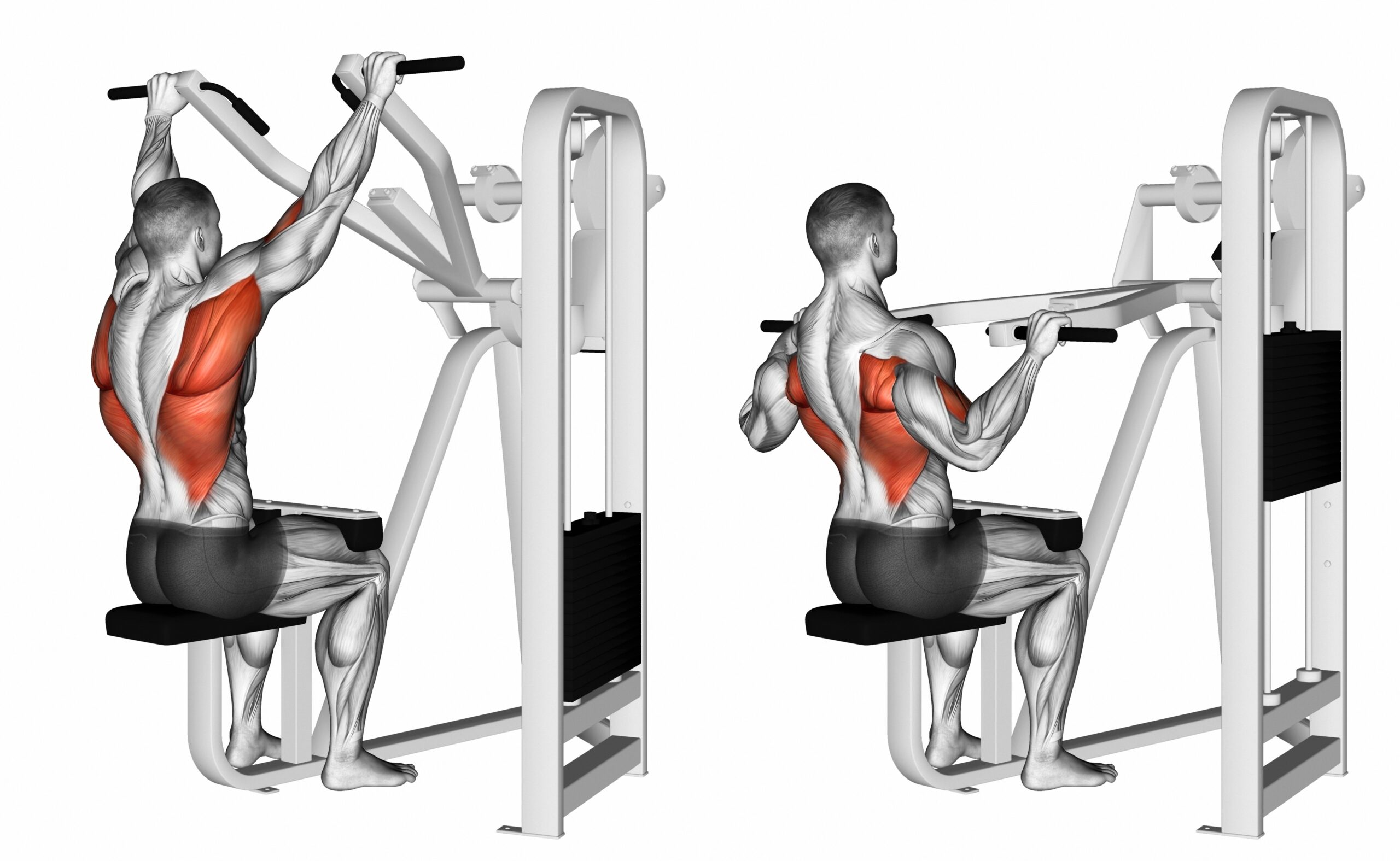 Однако, поскольку при использовании форсажных камер топливо потребляется с очень высокой скоростью, управление тягой должно требовать дополнительных движений пилота, чтобы предотвратить непреднамеренное срабатывание форсажных камер.
Однако, поскольку при использовании форсажных камер топливо потребляется с очень высокой скоростью, управление тягой должно требовать дополнительных движений пилота, чтобы предотвратить непреднамеренное срабатывание форсажных камер.
Несмотря на существование тренажеров, в них часто не предусмотрена возможность регулировки компонентов управления тягой, что позволяет осуществлять быструю и точную настройку в широком диапазоне.
КРАТКОЕ ОПИСАНИЕ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
Настоящее изобретение представляет симулятор управления тягой с удобной рукояткой. Фрикционная муфта используется для противодействия движению вперед / назад, муфта регулируется так, чтобы можно было добиться надлежащего «чувства». Кроме того, предусмотрены средства для регулировки положения рукоятки таким образом, чтобы ее мог удобно держать пилот.
На тренажере также установлены механические средства, так что пилоту требуется сложное движение для запуска форсажной камеры. Кроме того, предусмотрены средства для увеличения или ограничения степени перемещения рукоятки вперед/назад, чтобы имитировать сопоставимый диапазон для конкретного самолета.
Кроме того, предусмотрены средства для увеличения или ограничения степени перемещения рукоятки вперед/назад, чтобы имитировать сопоставимый диапазон для конкретного самолета.
Хотя настоящее изобретение относится к тренажеру, оно предназначено для удобного управления рукояткой вместо обычных рычагов, используемых в настоящее время пилотами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеупомянутые задачи и преимущества настоящего изобретения станут более понятными при рассмотрении вместе с прилагаемыми чертежами, на которых:
РИС. 1 представляет собой первый вид сбоку настоящего симулятора;
РИС. 2 — вид спереди настоящего тренажера;
РИС. 3 представляет собой второй вертикальный вид настоящего тренажера.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Имитатор управления тягой по настоящему изобретению показан на фиг. 1-3. Рукоятка 10 подвергается смещению вперед/назад, как показано стрелками на фиг. 1 и 3. Упор 12 для запястья расположен на одной линии с рукояткой 10, чтобы поддерживать запястье пилота и обеспечивать более точное изменение тяги. Рукоятка 10 легко заменяется, так что различные модели могут быть быстро установлены для моделирования. Кроме того, рукоятка 10 и упор 12 для запястья могут быть установлены с возможностью регулировки в вертикальном направлении, что позволяет быстро выполнять регулировки, тем самым удобно размещая пилота, использующего симулятор. Два параллельно расположенных кронштейна 14 и 16 крепятся к поверхности консоли или стороне кресла пилота с помощью соответствующих крепежных элементов 13 и 15. Опорная пластина 18 опирается и может перемещаться по двум рельсам 23 и 25, закрепленным на кронштейнах. 14 и 16. Нижняя направляющая 20 крепится болтами к пластине 18 и может свободно скользить по нижней направляющей 25 на тефлоновых втулках (не показаны). Верхний опорный блок 22 также прикручен к пластине 18 с помощью крепежных элементов 24. Положение всего органа управления тягой может варьироваться по диагональной линии, проходящей в направлении вперед-вниз, вверх-назад вдоль направляющих 23 и 25.
1 и 3. Упор 12 для запястья расположен на одной линии с рукояткой 10, чтобы поддерживать запястье пилота и обеспечивать более точное изменение тяги. Рукоятка 10 легко заменяется, так что различные модели могут быть быстро установлены для моделирования. Кроме того, рукоятка 10 и упор 12 для запястья могут быть установлены с возможностью регулировки в вертикальном направлении, что позволяет быстро выполнять регулировки, тем самым удобно размещая пилота, использующего симулятор. Два параллельно расположенных кронштейна 14 и 16 крепятся к поверхности консоли или стороне кресла пилота с помощью соответствующих крепежных элементов 13 и 15. Опорная пластина 18 опирается и может перемещаться по двум рельсам 23 и 25, закрепленным на кронштейнах. 14 и 16. Нижняя направляющая 20 крепится болтами к пластине 18 и может свободно скользить по нижней направляющей 25 на тефлоновых втулках (не показаны). Верхний опорный блок 22 также прикручен к пластине 18 с помощью крепежных элементов 24. Положение всего органа управления тягой может варьироваться по диагональной линии, проходящей в направлении вперед-вниз, вверх-назад вдоль направляющих 23 и 25. путем поворота маховика 27 на заднем конце верхней направляющей 23, которая вращается на подшипниках скольжения (не показаны) и, следовательно, может свободно вращаться. Эта регулировка позволяет пилоту регулировать положение узла управления тягой в соответствии с длиной его руки. Верхний блок 22 содержит вертикальный стержень с резьбой 11, который поддерживает упор для запястий 12 и позволяет регулировать высоту упора для запястий, поворачивая его в одну или другую сторону, чтобы поднять или опустить его.
путем поворота маховика 27 на заднем конце верхней направляющей 23, которая вращается на подшипниках скольжения (не показаны) и, следовательно, может свободно вращаться. Эта регулировка позволяет пилоту регулировать положение узла управления тягой в соответствии с длиной его руки. Верхний блок 22 содержит вертикальный стержень с резьбой 11, который поддерживает упор для запястий 12 и позволяет регулировать высоту упора для запястий, поворачивая его в одну или другую сторону, чтобы поднять или опустить его.
Узел механического сопротивления, обычно обозначенный ссылочной позицией 26 (фиг. 1), установлен на пластине 18 и обеспечивает сопротивление, необходимое для надлежащего «ощущения» при перемещении рукоятки 10 в направлении вперед/назад. Ощущение разработано для точной имитации ощущения управления тягой реального самолета. Узел 26 включает в себя опору 28, ясно показанную на фиг. 2 и 3 в качестве крепления компонентов сборки. Опора крепится к пластине 18 с помощью подходящих застежек 30. Как показано на фиг. 2, распорки 32 удерживают закрепленное положение опоры 28 на расстоянии, параллельном пластине 18.
Как показано на фиг. 2, распорки 32 удерживают закрепленное положение опоры 28 на расстоянии, параллельном пластине 18.
Основой узла 26 является фрикционное устройство 34 с косыми роликами, предпочтительно обычная фрикционная муфта, такая как тип, производимый Western Gear Corporation of California. Эта муфта имеет цилиндрический корпус, который также крепится к опоре 28 застежками 36, как показано на фиг. 2 и 3. Рукоятка 10 соединена с валом 42 (фиг. 1) фрикционного устройства 34 так, что сопротивление муфты вращательному движению передается на рукоятку 10 и реагирует на перемещение рукоятки вперед/назад.
Для измерения степени вращательного движения, соответствующей величине имитации управления тягой, предусмотрен датчик, такой как потенциометр 41. В предпочтительном варианте осуществления изобретения потенциометр крепится к кронштейну 38, причем последний крепится к пластине 18 крепежными элементами 40. Рычажный механизм соединяет вал 42 устройства 34 с валом потенциометра. Эта тяга включает вертикальную тягу 43, соединенную первым концом с валом 42, а вторым поворотным концом 46 с горизонтальной тягой 44. Противоположный конец последней тяги соединен в точке поворота 48 со второй вертикальной тягой 50. Последняя упомянутая вертикальное звено, в свою очередь, соединено с валом потенциометра 41. Соответственно, каждый раз, когда рукоятка 10 перемещается в направлении вперед/назад, вал 42 фрикционного устройства 34 вращается, создавая соответствующий поворот в потенциометре 41, через рычажные элементы. только что описал. Важно отметить, что хотя в качестве преобразователя указан потенциометр 41, для выполнения аналогичной функции доступны и другие обычные типы преобразователей. К ним относятся оптические энкодеры и линейные дифференциальные преобразователи. Хотя они не показаны, провода от потенциометра или другого преобразователя должны быть подключены к компьютеру-симулятору для моделирования измерений в соответствии с известными методами, которые сами по себе не являются частью настоящего изобретения.
Эта тяга включает вертикальную тягу 43, соединенную первым концом с валом 42, а вторым поворотным концом 46 с горизонтальной тягой 44. Противоположный конец последней тяги соединен в точке поворота 48 со второй вертикальной тягой 50. Последняя упомянутая вертикальное звено, в свою очередь, соединено с валом потенциометра 41. Соответственно, каждый раз, когда рукоятка 10 перемещается в направлении вперед/назад, вал 42 фрикционного устройства 34 вращается, создавая соответствующий поворот в потенциометре 41, через рычажные элементы. только что описал. Важно отметить, что хотя в качестве преобразователя указан потенциометр 41, для выполнения аналогичной функции доступны и другие обычные типы преобразователей. К ним относятся оптические энкодеры и линейные дифференциальные преобразователи. Хотя они не показаны, провода от потенциометра или другого преобразователя должны быть подключены к компьютеру-симулятору для моделирования измерений в соответствии с известными методами, которые сами по себе не являются частью настоящего изобретения.
Механические упоры 52 и 54 (РИС. 1) установлены по отдельности с возможностью скольжения относительно неподвижного крепления 56. Эти упоры предназначены для ограничения потенциального перемещения рукоятки 10 вперед/назад.
Как объяснялось ранее, настоящее изобретение предлагает моделирование работы форсажной камеры. Однако желательно требовать движения рукоятки, чтобы имитировать движение рукоятки, которое активирует форсажные камеры в реальном самолете. Эта забота о включении форсажной камеры связана с тем, что расход топлива во время работы форсажной камеры довольно высок.
Для достижения необходимого движения над корпусом фрикционного устройства 34 соосно установлена полуцилиндрическая пластина 58 (фиг. 2). Она удерживается на месте с помощью хомутов 60. Разумеется, другие типы обеспечения вполне возможно. Пластина 58 имеет вырез 62, который можно охарактеризовать как прямой участок, соединяющийся со смещенным участком 64. Именно этот смещенный или зигзагообразный участок должен пересекаться опорным стержнем 65 рукоятки 10 для имитации работы форсажной камеры.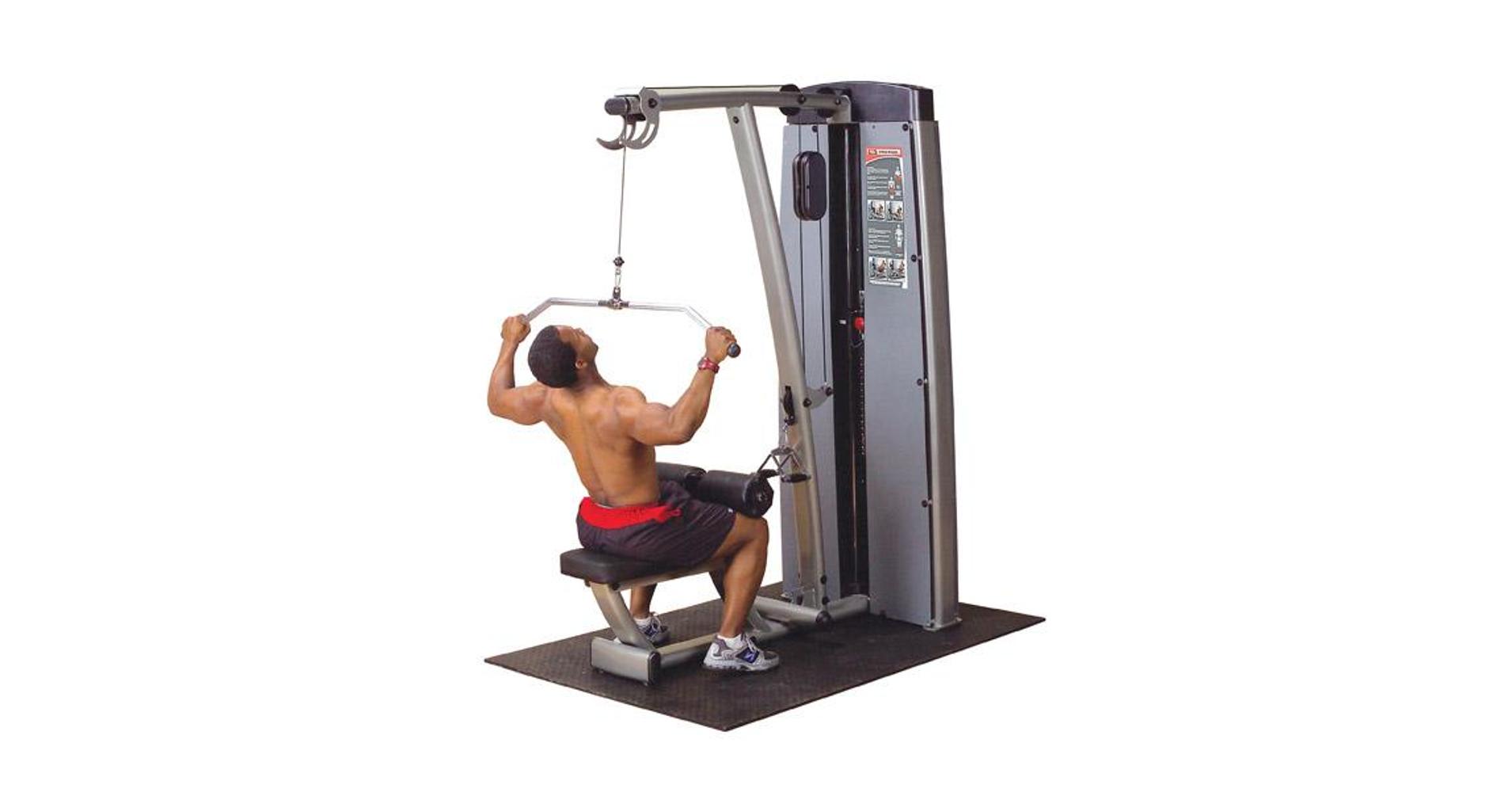 Рукоятка 10 прикреплена к валу 65, который, в свою очередь, прикреплен к верхнему концу звена 43 с помощью устройства типа вилки, которое позволяет ему вращаться в поперечном направлении вокруг оси 200 (фиг. 2). Кроме того, подпружиненный стопорный механизм (не показан) установлен на звене 43 и заставляет рукоятку занимать одно из двух боковых положений, соответствующих нормальной работе или работе на форсаже. Соответственно, если пилот хочет войти в зону форсажа рукояткой 10, он должен выполнить зигзагообразное движение и преодолеть усилие пружины бокового фиксатора, тем самым избегая непреднамеренной имитации работы форсажной камеры путем случайного простого поворотного смещения рукоятки.
Рукоятка 10 прикреплена к валу 65, который, в свою очередь, прикреплен к верхнему концу звена 43 с помощью устройства типа вилки, которое позволяет ему вращаться в поперечном направлении вокруг оси 200 (фиг. 2). Кроме того, подпружиненный стопорный механизм (не показан) установлен на звене 43 и заставляет рукоятку занимать одно из двух боковых положений, соответствующих нормальной работе или работе на форсаже. Соответственно, если пилот хочет войти в зону форсажа рукояткой 10, он должен выполнить зигзагообразное движение и преодолеть усилие пружины бокового фиксатора, тем самым избегая непреднамеренной имитации работы форсажной камеры путем случайного простого поворотного смещения рукоятки.
Сила трения, или сила ощущения, определяется регулировкой предварительной нагрузки фрикционного устройства 34. Ее можно изменить, ввинчивая регулировочный винт с резьбой 66 (РИС. 3), чтобы получить желаемую величину трения или «ощущения». .
В соответствии с предыдущим обсуждением следует понимать, что настоящее изобретение позволяет оценить тип управления боковой рукояткой, установленной на сиденье, для управления тягой двигателя и может служить инструментом для анализа концепций управления тягой в различных усовершенствованных макетах кабины.